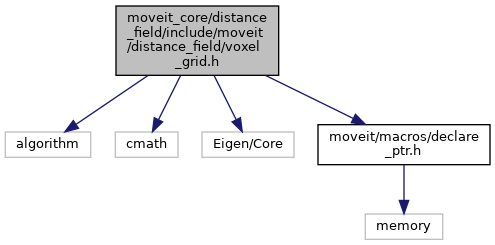
Include dependency graph for voxel_grid.h:
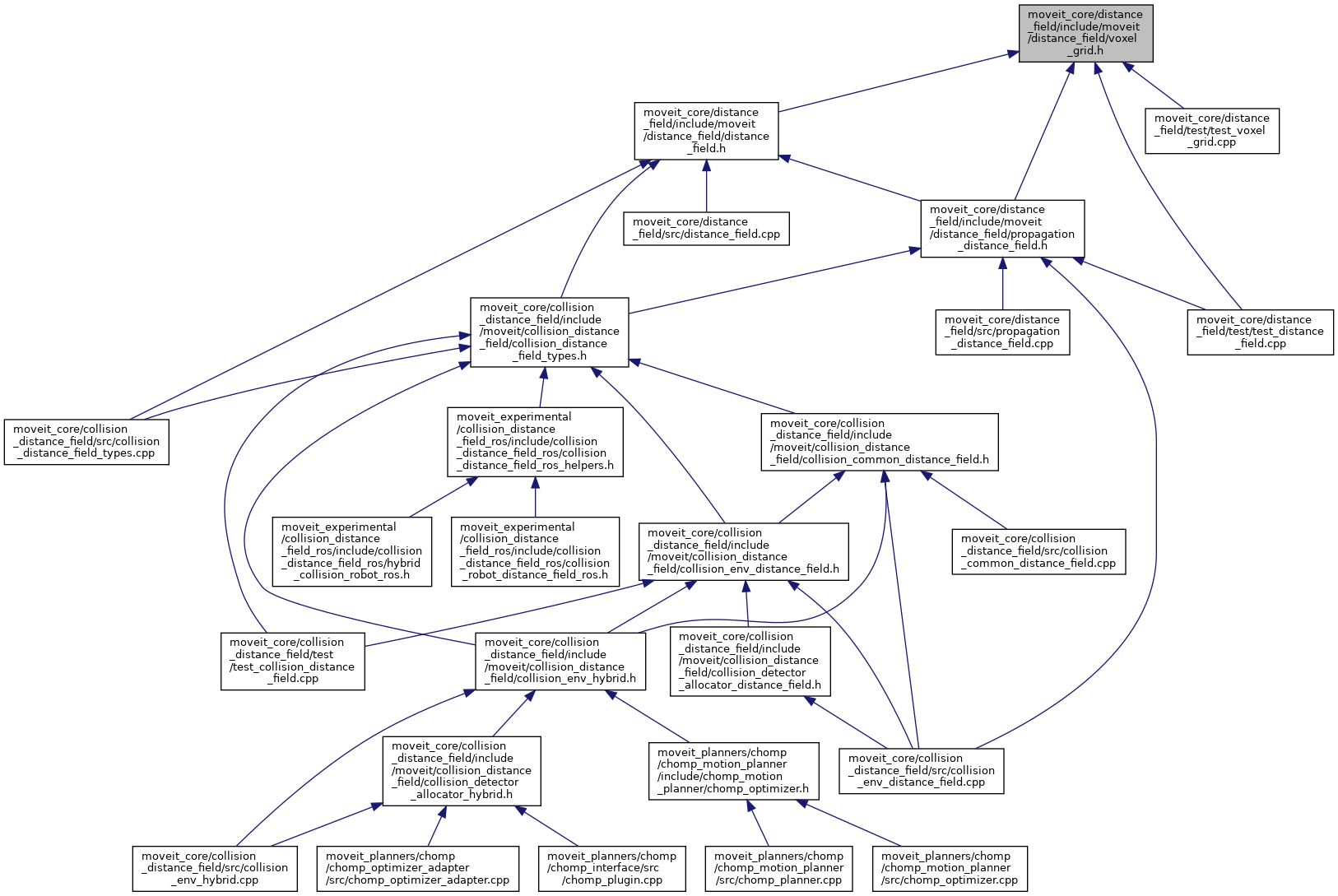
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | distance_field::VoxelGrid< T > |
| VoxelGrid holds a dense 3D, axis-aligned set of data at a given resolution, where the data is supplied as a template parameter. More... | |
Namespaces | |
| distance_field | |
| Namespace for holding classes that generate distance fields. | |
Enumerations | |
| enum | distance_field::Dimension { distance_field::DIM_X = 0 , distance_field::DIM_Y = 1 , distance_field::DIM_Z = 2 } |
| Specifies dimension of different axes. More... | |