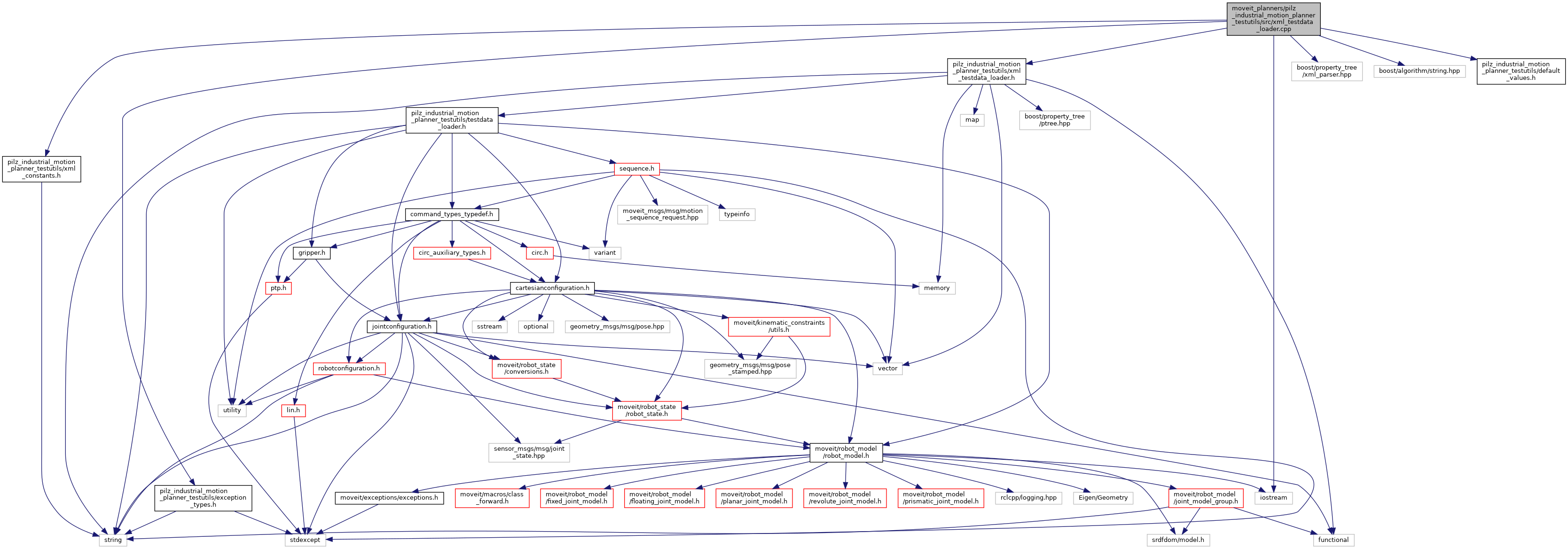
#include <pilz_industrial_motion_planner_testutils/xml_testdata_loader.h>#include <iostream>#include <boost/property_tree/xml_parser.hpp>#include <boost/algorithm/string.hpp>#include <pilz_industrial_motion_planner_testutils/default_values.h>#include <pilz_industrial_motion_planner_testutils/exception_types.h>#include <pilz_industrial_motion_planner_testutils/xml_constants.h>
Include dependency graph for xml_testdata_loader.cpp:
Go to the source code of this file.
Classes | |
| class | pilz_industrial_motion_planner_testutils::CmdReader |
| class | pilz_industrial_motion_planner_testutils::CmdGetterAdapter< CmdType > |
Namespaces | |
| pilz_industrial_motion_planner_testutils | |