Implementation of a cache insertion policy that always decides to insert and never decides to prune. More...
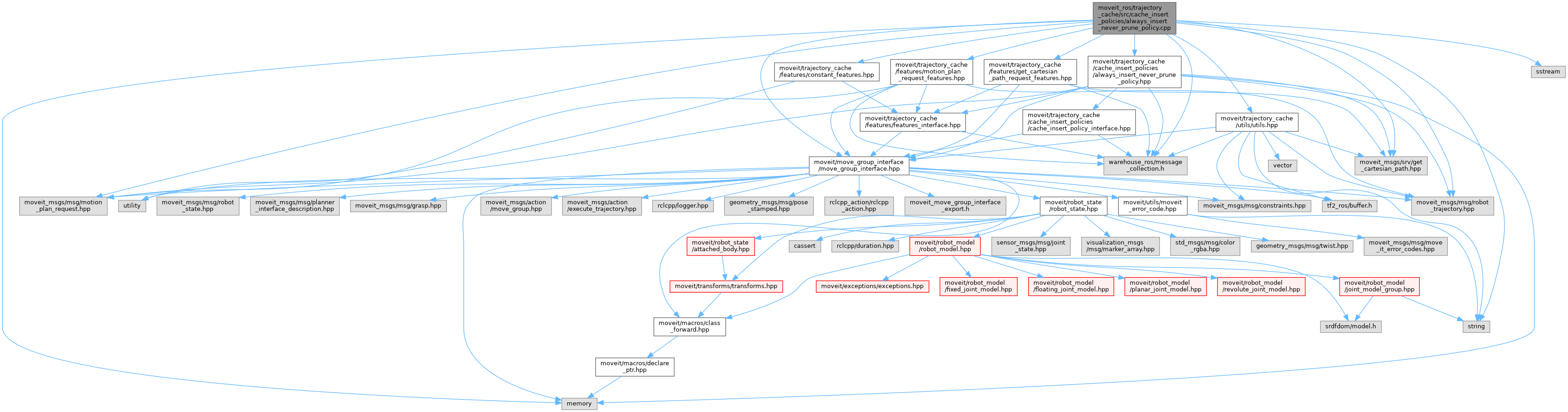
#include <memory>#include <sstream>#include <string>#include <warehouse_ros/message_collection.h>#include <moveit/move_group_interface/move_group_interface.hpp>#include <moveit_msgs/msg/motion_plan_request.hpp>#include <moveit_msgs/msg/robot_trajectory.hpp>#include <moveit_msgs/srv/get_cartesian_path.hpp>#include <moveit/trajectory_cache/cache_insert_policies/always_insert_never_prune_policy.hpp>#include <moveit/trajectory_cache/features/constant_features.hpp>#include <moveit/trajectory_cache/features/get_cartesian_path_request_features.hpp>#include <moveit/trajectory_cache/features/motion_plan_request_features.hpp>#include <moveit/trajectory_cache/utils/utils.hpp>
Include dependency graph for always_insert_never_prune_policy.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | moveit_ros |
| namespace | moveit_ros::trajectory_cache |
Detailed Description
Implementation of a cache insertion policy that always decides to insert and never decides to prune.
Definition in file always_insert_never_prune_policy.cpp.