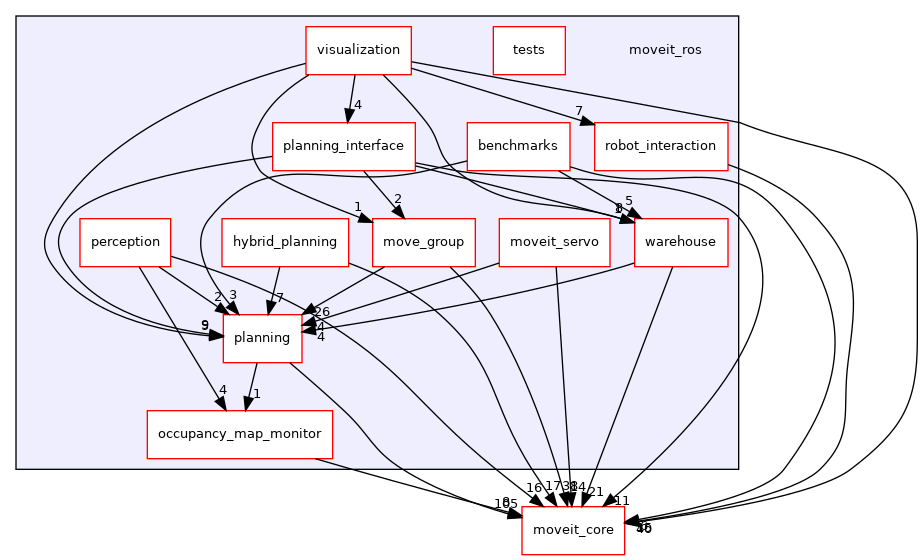
Directory dependency graph for moveit_ros:
Directories | |
| benchmarks | |
| hybrid_planning | |
| move_group | |
| moveit_servo | |
| occupancy_map_monitor | |
| perception | |
| planning | |
| planning_interface | |
| robot_interaction | |
| tests | |
| trajectory_cache | |
| visualization | |
| warehouse | |
|
moveit2
The MoveIt Motion Planning Framework for ROS 2.
|
Directories | |
| benchmarks | |
| hybrid_planning | |
| move_group | |
| moveit_servo | |
| occupancy_map_monitor | |
| perception | |
| planning | |
| planning_interface | |
| robot_interaction | |
| tests | |
| trajectory_cache | |
| visualization | |
| warehouse | |