Classes | |
| class | AlwaysInsertNeverPrunePolicy |
| A cache insertion policy that always decides to insert and never decides to prune for motion plan requests. More... | |
| class | BestSeenExecutionTimePolicy |
| A cache insertion policy that only decides to insert if the motion plan is the one with the shortest execution time seen so far amongst exactly matching MotionPlanRequests. More... | |
| class | CacheInsertPolicyInterface |
| class | CartesianAlwaysInsertNeverPrunePolicy |
| A cache insertion policy that always decides to insert and never decides to prune for cartesian path requests. More... | |
| class | CartesianBestSeenExecutionTimePolicy |
| A cache insertion policy that only decides to insert if the motion plan is the one with the shortest execution time seen so far amongst exactly matching GetCartesianPath requests. More... | |
| class | CartesianMaxSpeedAndAccelerationFeatures |
| Extracts max velocity and acceleration scaling, and cartesian speed limits from the plan request. More... | |
| class | CartesianMaxStepAndJumpThresholdFeatures |
| Extracts max step and jump thresholds from the plan request. More... | |
| class | CartesianPathConstraintsFeatures |
Extracts features from the path_constraints field in the plan request. More... | |
| class | CartesianStartStateJointStateFeatures |
Extracts details of the joint state from the start_state field in the plan request. More... | |
| class | CartesianWaypointsFeatures |
Extracts features from the waypoints and link_name field in the plan request. More... | |
| class | CartesianWorkspaceFeatures |
| Extracts group name and frame ID from the plan request. More... | |
| class | FeaturesInterface |
| class | GoalConstraintsFeatures |
Extracts features from the goal_constraints field in the plan request. More... | |
| class | MaxSpeedAndAccelerationFeatures |
| Extracts max velocity and acceleration scaling, and cartesian speed limits from the plan request. More... | |
| class | MetadataOnlyFeature |
| class | PathConstraintsFeatures |
Extracts features from the path_constraints field in the plan request. More... | |
| class | QueryOnlyEqFeature |
| class | QueryOnlyGTEFeature |
| class | QueryOnlyLTEFeature |
| class | QueryOnlyRangeInclusiveWithToleranceFeature |
| class | StartStateJointStateFeatures |
Extracts details of the joint state from the start_state field in the plan request. More... | |
| class | TrajectoryCache |
| Trajectory Cache manager for MoveIt. More... | |
| class | TrajectoryConstraintsFeatures |
Extracts features from the trajectory_constraints field in the plan request. More... | |
| class | WorkspaceFeatures |
Extracts group name and details of the workspace_parameters field in the plan request. More... | |
Functions | |
| std::string | getWorkspaceFrameId (const moveit::planning_interface::MoveGroupInterface &move_group, const moveit_msgs::msg::WorkspaceParameters &workspace_parameters) |
| Gets workspace frame ID. If workspace_parameters has no frame ID, fetch it from move_group. | |
| std::string | getCartesianPathRequestFrameId (const moveit::planning_interface::MoveGroupInterface &move_group, const moveit_msgs::srv::GetCartesianPath::Request &path_request) |
| Gets cartesian path request frame ID. If path_request has no frame ID, fetch it from move_group. | |
| moveit::core::MoveItErrorCode | restateInNewFrame (const std::shared_ptr< tf2_ros::Buffer > &tf, const std::string &target_frame, const std::string &source_frame, geometry_msgs::msg::Point *translation, geometry_msgs::msg::Quaternion *rotation, const tf2::TimePoint &lookup_time=tf2::TimePointZero) |
| Restates a translation and rotation in a new frame. | |
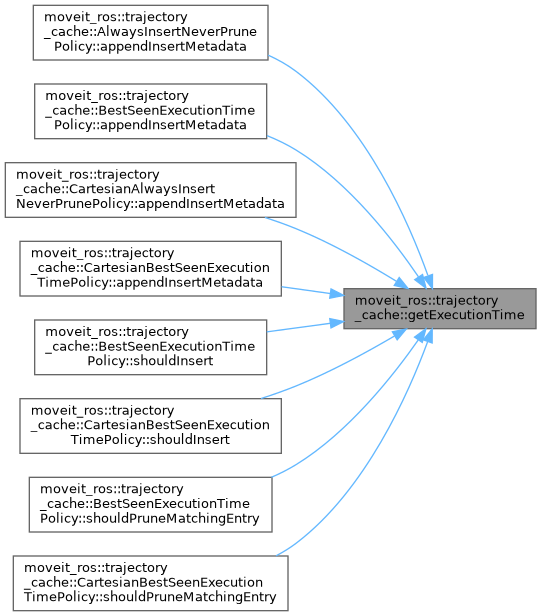
| double | getExecutionTime (const moveit_msgs::msg::RobotTrajectory &trajectory) |
| Returns the execution time of the trajectory in double seconds. | |
| moveit_msgs::srv::GetCartesianPath::Request | constructGetCartesianPathRequest (moveit::planning_interface::MoveGroupInterface &move_group, const std::vector< geometry_msgs::msg::Pose > &waypoints, double max_step, double jump_threshold, bool avoid_collisions=true) |
| Constructs a GetCartesianPath request. | |
| void | queryAppendCenterWithTolerance (warehouse_ros::Query &query, const std::string &name, double center, double tolerance) |
| Appends a range inclusive query with some tolerance about some center value. | |
| void | sortJointConstraints (std::vector< moveit_msgs::msg::JointConstraint > &joint_constraints) |
| Sorts a vector of joint constraints in-place by joint name. | |
| void | sortPositionConstraints (std::vector< moveit_msgs::msg::PositionConstraint > &position_constraints) |
| Sorts a vector of position constraints in-place by link name. | |
| void | sortOrientationConstraints (std::vector< moveit_msgs::msg::OrientationConstraint > &orientation_constraints) |
| Sorts a vector of orientation constraints in-place by link name. | |
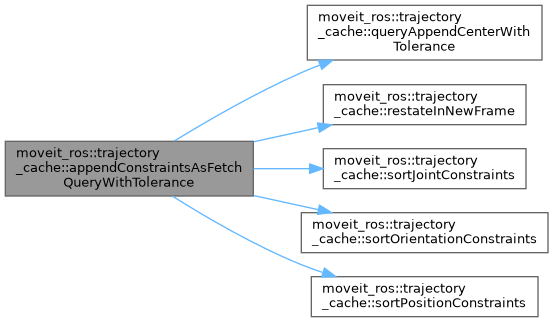
| moveit::core::MoveItErrorCode | appendConstraintsAsFetchQueryWithTolerance (warehouse_ros::Query &query, std::vector< moveit_msgs::msg::Constraints > constraints, const moveit::planning_interface::MoveGroupInterface &move_group, double match_tolerance, const std::string &reference_frame_id, const std::string &prefix) |
| Extracts relevant features from a vector of moveit_msgs::msg::Constraints messages to a fetch query, with tolerance. | |
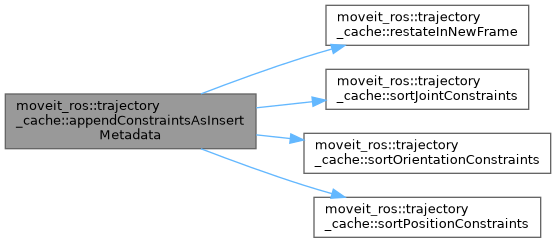
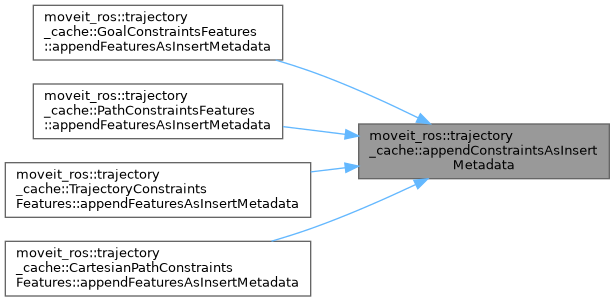
| moveit::core::MoveItErrorCode | appendConstraintsAsInsertMetadata (warehouse_ros::Metadata &metadata, std::vector< moveit_msgs::msg::Constraints > constraints, const moveit::planning_interface::MoveGroupInterface &move_group, const std::string &reference_frame_id, const std::string &prefix) |
| Extracts relevant features from a vector of moveit_msgs::msg::Constraints messages to a cache entry's metadata. | |
| moveit::core::MoveItErrorCode | appendRobotStateJointStateAsFetchQueryWithTolerance (warehouse_ros::Query &query, const moveit_msgs::msg::RobotState &robot_state, const moveit::planning_interface::MoveGroupInterface &move_group, double match_tolerance, const std::string &prefix) |
| Extracts relevant features from a vector of moveit_msgs::msg::Constraints messages to a fetch query, with tolerance. | |
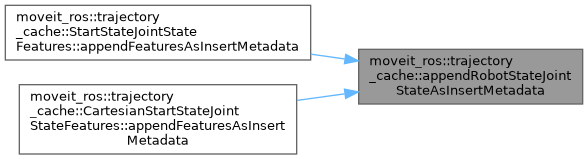
| moveit::core::MoveItErrorCode | appendRobotStateJointStateAsInsertMetadata (warehouse_ros::Metadata &metadata, const moveit_msgs::msg::RobotState &robot_state, const moveit::planning_interface::MoveGroupInterface &move_group, const std::string &prefix) |
| Extracts relevant features from a vector of moveit_msgs::msg::Constraints messages to a cache entry's metadata. | |
| std::string | getWorkspaceFrameId (const MoveGroupInterface &move_group, const moveit_msgs::msg::WorkspaceParameters &workspace_parameters) |
| std::string | getCartesianPathRequestFrameId (const MoveGroupInterface &move_group, const GetCartesianPath::Request &path_request) |
| GetCartesianPath::Request | constructGetCartesianPathRequest (MoveGroupInterface &move_group, const std::vector< geometry_msgs::msg::Pose > &waypoints, double max_step, double jump_threshold, bool avoid_collisions) |
| void | queryAppendCenterWithTolerance (Query &query, const std::string &name, double center, double tolerance) |
| moveit::core::MoveItErrorCode | appendConstraintsAsFetchQueryWithTolerance (Query &query, std::vector< moveit_msgs::msg::Constraints > constraints, const MoveGroupInterface &move_group, double match_tolerance, const std::string &reference_frame_id, const std::string &prefix) |
| moveit::core::MoveItErrorCode | appendConstraintsAsInsertMetadata (Metadata &metadata, std::vector< moveit_msgs::msg::Constraints > constraints, const MoveGroupInterface &move_group, const std::string &workspace_frame_id, const std::string &prefix) |
| moveit::core::MoveItErrorCode | appendRobotStateJointStateAsFetchQueryWithTolerance (Query &query, const moveit_msgs::msg::RobotState &robot_state, const MoveGroupInterface &move_group, double match_tolerance, const std::string &prefix) |
| moveit::core::MoveItErrorCode | appendRobotStateJointStateAsInsertMetadata (Metadata &metadata, const moveit_msgs::msg::RobotState &robot_state, const MoveGroupInterface &move_group, const std::string &prefix) |
Function Documentation
◆ appendConstraintsAsFetchQueryWithTolerance() [1/2]
| moveit::core::MoveItErrorCode moveit_ros::trajectory_cache::appendConstraintsAsFetchQueryWithTolerance | ( | Query & | query, |
| std::vector< moveit_msgs::msg::Constraints > | constraints, | ||
| const MoveGroupInterface & | move_group, | ||
| double | match_tolerance, | ||
| const std::string & | reference_frame_id, | ||
| const std::string & | prefix | ||
| ) |
◆ appendConstraintsAsFetchQueryWithTolerance() [2/2]
| moveit::core::MoveItErrorCode moveit_ros::trajectory_cache::appendConstraintsAsFetchQueryWithTolerance | ( | warehouse_ros::Query & | query, |
| std::vector< moveit_msgs::msg::Constraints > | constraints, | ||
| const moveit::planning_interface::MoveGroupInterface & | move_group, | ||
| double | match_tolerance, | ||
| const std::string & | reference_frame_id, | ||
| const std::string & | prefix | ||
| ) |
Extracts relevant features from a vector of moveit_msgs::msg::Constraints messages to a fetch query, with tolerance.
This will extract relevant features from the joint, position, and orientation constraints per element. This exists because many keyable messages contain constraints which should be handled similarly.
WARNING: Visibility constraints are not supported.
Additionally, the component constraints within each vector element are sorted to reduce cache cardinality. For the same reason, constraints with frames are restated in terms of the workspace frame.
We copy the input constraints to support this.
- Parameters
-
[in,out] query. The query to add features to. [in] constraints. The constraints to extract features from. [in] move_group. The manipulator move group, used to get its state. [in] reference_frame_id. The frame to restate constraints in. [in] prefix. A prefix to add to feature keys.
- Returns
- moveit::core::MoveItErrorCode::SUCCESS if successfully appended. Otherwise, will return a different error code, in which case the query should not be reused.
◆ appendConstraintsAsInsertMetadata() [1/2]
| moveit::core::MoveItErrorCode moveit_ros::trajectory_cache::appendConstraintsAsInsertMetadata | ( | Metadata & | metadata, |
| std::vector< moveit_msgs::msg::Constraints > | constraints, | ||
| const MoveGroupInterface & | move_group, | ||
| const std::string & | workspace_frame_id, | ||
| const std::string & | prefix | ||
| ) |
◆ appendConstraintsAsInsertMetadata() [2/2]
| moveit::core::MoveItErrorCode moveit_ros::trajectory_cache::appendConstraintsAsInsertMetadata | ( | warehouse_ros::Metadata & | metadata, |
| std::vector< moveit_msgs::msg::Constraints > | constraints, | ||
| const moveit::planning_interface::MoveGroupInterface & | move_group, | ||
| const std::string & | reference_frame_id, | ||
| const std::string & | prefix | ||
| ) |
Extracts relevant features from a vector of moveit_msgs::msg::Constraints messages to a cache entry's metadata.
This will extract relevant features from the joint, position, and orientation constraints per element. This exists because many keyable messages contain constraints which should be handled similarly.
WARNING: Visibility constraints and constraint regions are not supported.
Additionally, the component constraints within each vector element are sorted to reduce cache cardinality. For the same reason, constraints with frames are restated in terms of the workspace frame.
We copy the input constraints to support this.
- Parameters
-
[in,out] metadata. The metadata to add features to. [in] constraints. The constraints to extract features from. [in] move_group. The manipulator move group, used to get its state. [in] reference_frame_id. The frame to restate constraints in. [in] prefix. A prefix to add to feature keys.
- Returns
- moveit::core::MoveItErrorCode::SUCCESS if successfully appended. Otherwise, will return a different error code, in which case the metadata should not be reused.
◆ appendRobotStateJointStateAsFetchQueryWithTolerance() [1/2]
| moveit::core::MoveItErrorCode moveit_ros::trajectory_cache::appendRobotStateJointStateAsFetchQueryWithTolerance | ( | Query & | query, |
| const moveit_msgs::msg::RobotState & | robot_state, | ||
| const MoveGroupInterface & | move_group, | ||
| double | match_tolerance, | ||
| const std::string & | prefix | ||
| ) |

◆ appendRobotStateJointStateAsFetchQueryWithTolerance() [2/2]
| moveit::core::MoveItErrorCode moveit_ros::trajectory_cache::appendRobotStateJointStateAsFetchQueryWithTolerance | ( | warehouse_ros::Query & | query, |
| const moveit_msgs::msg::RobotState & | robot_state, | ||
| const moveit::planning_interface::MoveGroupInterface & | move_group, | ||
| double | match_tolerance, | ||
| const std::string & | prefix | ||
| ) |
Extracts relevant features from a vector of moveit_msgs::msg::Constraints messages to a fetch query, with tolerance.
This will extract relevant features from the joint, position, and orientation constraints per element. This exists because many keyable messages contain constraints which should be handled similarly.
WARNING: Visibility constraints are not supported.
Additionally, the component constraints within each vector element are sorted to reduce cache cardinality. For the same reason, constraints with frames are restated in terms of the workspace frame.
We copy the input constraints to support this.
- Parameters
-
[in,out] query. The query to add features to. [in] robot_state. The robot state to extract features from. [in] move_group. The manipulator move group, used to get its state. [in] prefix. A prefix to add to feature keys.
- Returns
- moveit::core::MoveItErrorCode::SUCCESS if successfully appended. Otherwise, will return a different error code, in which case the query should not be reused.
◆ appendRobotStateJointStateAsInsertMetadata() [1/2]
| moveit::core::MoveItErrorCode moveit_ros::trajectory_cache::appendRobotStateJointStateAsInsertMetadata | ( | Metadata & | metadata, |
| const moveit_msgs::msg::RobotState & | robot_state, | ||
| const MoveGroupInterface & | move_group, | ||
| const std::string & | prefix | ||
| ) |
◆ appendRobotStateJointStateAsInsertMetadata() [2/2]
| moveit::core::MoveItErrorCode moveit_ros::trajectory_cache::appendRobotStateJointStateAsInsertMetadata | ( | warehouse_ros::Metadata & | metadata, |
| const moveit_msgs::msg::RobotState & | robot_state, | ||
| const moveit::planning_interface::MoveGroupInterface & | move_group, | ||
| const std::string & | prefix | ||
| ) |
Extracts relevant features from a vector of moveit_msgs::msg::Constraints messages to a cache entry's metadata.
This will extract relevant features from the joint, position, and orientation constraints per element. This exists because many keyable messages contain constraints which should be handled similarly.
WARNING: Visibility constraints and constraint regions are not supported.
Additionally, the component constraints within each vector element are sorted to reduce cache cardinality. For the same reason, constraints with frames are restated in terms of the workspace frame.
We copy the input constraints to support this.
- Parameters
-
[in,out] metadata. The metadata to add features to. [in] robot_state. The robot state to extract features from. [in] move_group. The manipulator move group, used to get its state. [in] prefix. A prefix to add to feature keys.
- Returns
- moveit::core::MoveItErrorCode::SUCCESS if successfully appended. Otherwise, will return a different error code, in which case the metadata should not be reused.
◆ constructGetCartesianPathRequest() [1/2]
| GetCartesianPath::Request moveit_ros::trajectory_cache::constructGetCartesianPathRequest | ( | MoveGroupInterface & | move_group, |
| const std::vector< geometry_msgs::msg::Pose > & | waypoints, | ||
| double | max_step, | ||
| double | jump_threshold, | ||
| bool | avoid_collisions | ||
| ) |

◆ constructGetCartesianPathRequest() [2/2]
| moveit_msgs::srv::GetCartesianPath::Request moveit_ros::trajectory_cache::constructGetCartesianPathRequest | ( | moveit::planning_interface::MoveGroupInterface & | move_group, |
| const std::vector< geometry_msgs::msg::Pose > & | waypoints, | ||
| double | max_step, | ||
| double | jump_threshold, | ||
| bool | avoid_collisions = true |
||
| ) |
Constructs a GetCartesianPath request.
This is a convenience function. This mimics the move group computeCartesianPath signature (without path constraints).
WARNING: The following fields are not supported, if you want to specify them, add them in yourself.
- prismatic_jump_threshold
- revolute_jump_threshold
- cartesian_speed_limited_link
- max_cartesian_speed
- Parameters
-
[in] move_group. The manipulator move group, used to get its state, frames, and link. [in] waypoints. The cartesian waypoints to request the path for. [in] max_step. The value to populate into the GetCartesianPathrequest's max_step field.[in] jump_threshold. The value to populate into the GetCartesianPathrequest's jump_threshold field.[in] avoid_collisions. The value to populate into the GetCartesianPathrequest's avoid_collisions field.
- Returns

◆ getCartesianPathRequestFrameId() [1/2]
| std::string moveit_ros::trajectory_cache::getCartesianPathRequestFrameId | ( | const MoveGroupInterface & | move_group, |
| const GetCartesianPath::Request & | path_request | ||
| ) |
◆ getCartesianPathRequestFrameId() [2/2]
| std::string moveit_ros::trajectory_cache::getCartesianPathRequestFrameId | ( | const moveit::planning_interface::MoveGroupInterface & | move_group, |
| const moveit_msgs::srv::GetCartesianPath::Request & | path_request | ||
| ) |
Gets cartesian path request frame ID. If path_request has no frame ID, fetch it from move_group.
It makes sense to use getPoseReferenceFrame() in the absence of a frame ID in the request because the same method is used to populate the header frame ID in the MoveGroupInterface's computeCartesianPath() method, which this function is associated with.

◆ getExecutionTime()
| double moveit_ros::trajectory_cache::getExecutionTime | ( | const moveit_msgs::msg::RobotTrajectory & | trajectory | ) |
◆ getWorkspaceFrameId() [1/2]
| std::string moveit_ros::trajectory_cache::getWorkspaceFrameId | ( | const MoveGroupInterface & | move_group, |
| const moveit_msgs::msg::WorkspaceParameters & | workspace_parameters | ||
| ) |
◆ getWorkspaceFrameId() [2/2]
| std::string moveit_ros::trajectory_cache::getWorkspaceFrameId | ( | const moveit::planning_interface::MoveGroupInterface & | move_group, |
| const moveit_msgs::msg::WorkspaceParameters & | workspace_parameters | ||
| ) |
Gets workspace frame ID. If workspace_parameters has no frame ID, fetch it from move_group.
It makes sense to use getPoseReferenceFrame() in the absence of a frame ID in the request because the same method is used to populate the header frame ID in the MoveGroupInterface's computeCartesianPath() method, which this function is associated with.

◆ queryAppendCenterWithTolerance() [1/2]
| void moveit_ros::trajectory_cache::queryAppendCenterWithTolerance | ( | Query & | query, |
| const std::string & | name, | ||
| double | center, | ||
| double | tolerance | ||
| ) |
◆ queryAppendCenterWithTolerance() [2/2]
| void moveit_ros::trajectory_cache::queryAppendCenterWithTolerance | ( | warehouse_ros::Query & | query, |
| const std::string & | name, | ||
| double | center, | ||
| double | tolerance | ||
| ) |
Appends a range inclusive query with some tolerance about some center value.
◆ restateInNewFrame()
| MoveItErrorCode moveit_ros::trajectory_cache::restateInNewFrame | ( | const std::shared_ptr< tf2_ros::Buffer > & | tf, |
| const std::string & | target_frame, | ||
| const std::string & | source_frame, | ||
| geometry_msgs::msg::Point * | translation, | ||
| geometry_msgs::msg::Quaternion * | rotation, | ||
| const tf2::TimePoint & | lookup_time = tf2::TimePointZero |
||
| ) |
Restates a translation and rotation in a new frame.
- Parameters
-
[in] tf. The transform buffer to use. [in] target_frame. The frame to restate in. [in] source_frame. The frame to restate from. [in,out] translation. The translation to restate. Ignored if nullptr. [in,out] rotation. The rotation to restate. Ignored if nullptr.
- Returns
- MoveItErrorCode::SUCCESS if successfully restated. Otherwise, will return return MoveItErrorCode::FRAME_TRANSFORM_FAILURE if the transform could not be retrieved.
Definition at line 96 of file utils.cpp.
◆ sortJointConstraints()
| void moveit_ros::trajectory_cache::sortJointConstraints | ( | std::vector< moveit_msgs::msg::JointConstraint > & | joint_constraints | ) |
◆ sortOrientationConstraints()
| void moveit_ros::trajectory_cache::sortOrientationConstraints | ( | std::vector< moveit_msgs::msg::OrientationConstraint > & | orientation_constraints | ) |