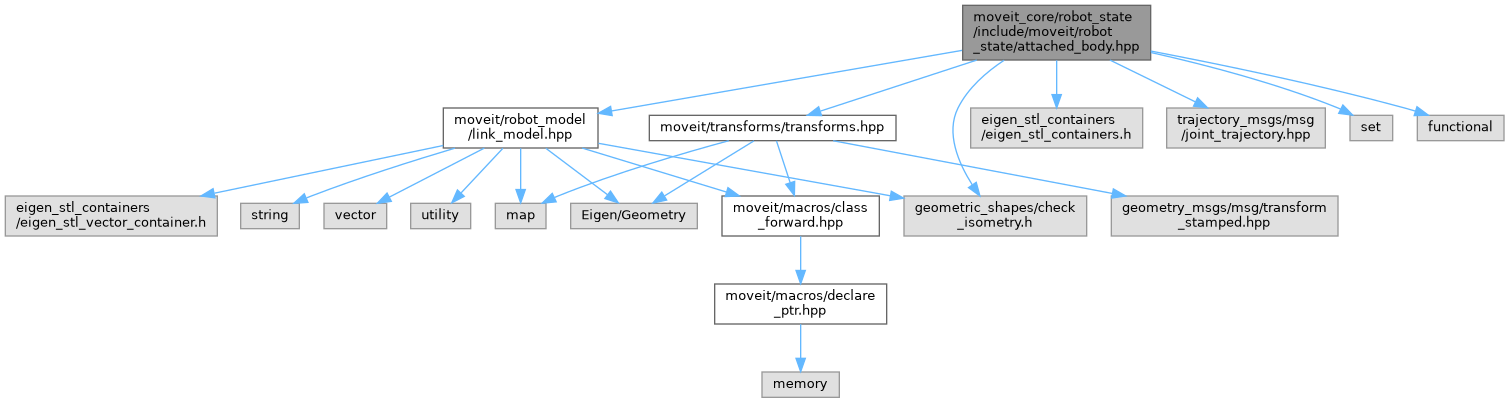
#include <moveit/robot_model/link_model.hpp>#include <moveit/transforms/transforms.hpp>#include <geometric_shapes/check_isometry.h>#include <eigen_stl_containers/eigen_stl_containers.h>#include <trajectory_msgs/msg/joint_trajectory.hpp>#include <set>#include <functional>
Include dependency graph for attached_body.hpp:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | moveit::core::AttachedBody |
| Object defining bodies that can be attached to robot links. More... | |
Namespaces | |
| namespace | moveit |
| Main namespace for MoveIt. | |
| namespace | moveit::core |
| Core components of MoveIt. | |
Typedefs | |
| typedef std::function< void(AttachedBody *body, bool attached)> | moveit::core::AttachedBodyCallback |