Main namespace for MoveIt. More...
Namespaces | |
| namespace | core |
| Core components of MoveIt. | |
| namespace | hybrid_planning |
| namespace | planning_interface |
| Simple interface to MoveIt components. | |
| namespace | planning_pipeline_interfaces |
| namespace | policies |
| namespace | semantic_world |
| namespace | servo_client |
| namespace | tools |
| This namespace includes classes and functions that are helpful in the implementation of other MoveIt components. This is not code specific to the functionality provided by MoveIt. | |
| namespace | utils |
Classes | |
| class | ConstructException |
| This may be thrown during construction of objects if errors occur. More... | |
| class | Exception |
| This may be thrown if unrecoverable errors occur. More... | |
Functions | |
| void | setNodeLoggerName (const std::string &name) |
| Call once after creating a node to initialize logging namespaces. | |
| rclcpp::Logger | getLogger (const std::string &name) |
| Creates a namespaced logger. | |
| rclcpp::Logger & | getGlobalRootLogger () |
Detailed Description
Main namespace for MoveIt.
convenience functions and classes used for making simple robot models for testing.
Function Documentation
◆ getGlobalRootLogger()
| rclcpp::Logger & moveit::getGlobalRootLogger | ( | ) |
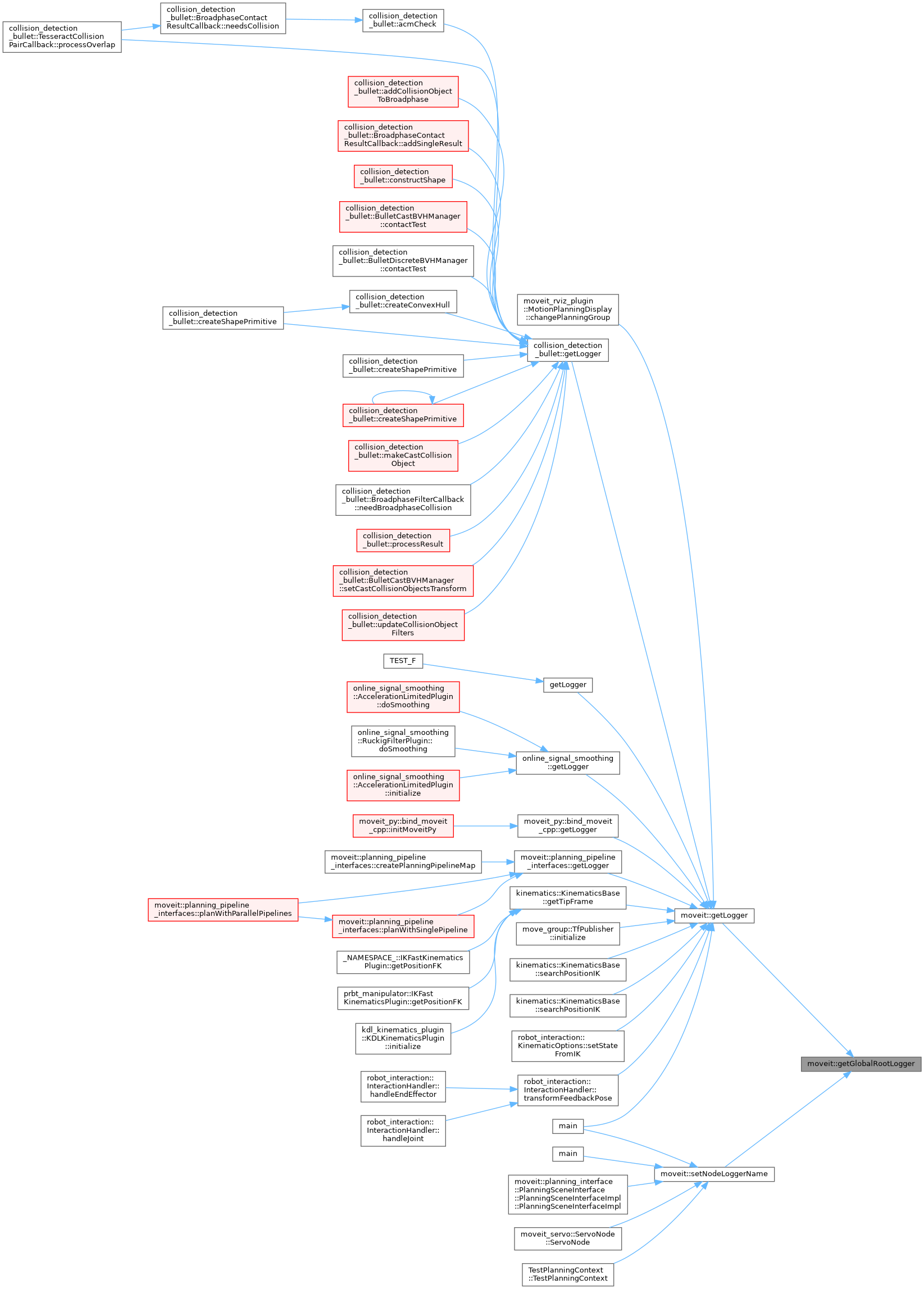
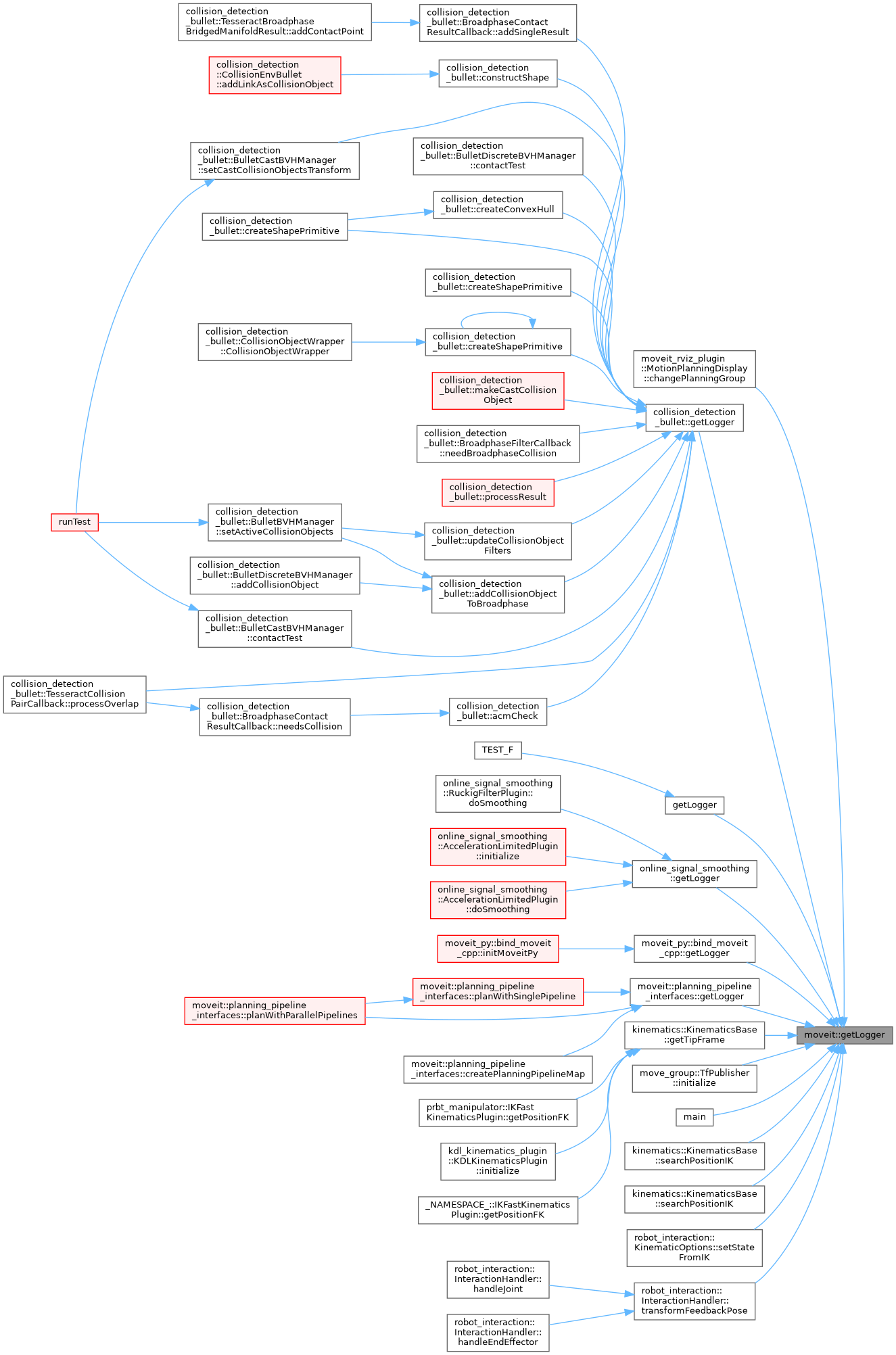
◆ getLogger()
| rclcpp::Logger moveit::getLogger | ( | const std::string & | name | ) |
Creates a namespaced logger.
Definition at line 79 of file logger.cpp.
Here is the call graph for this function:

Here is the caller graph for this function:
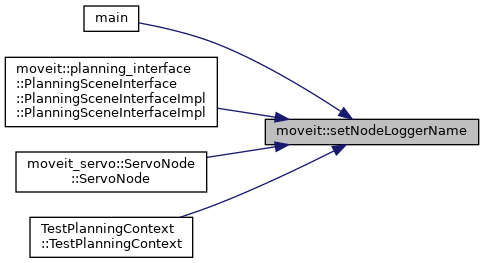
◆ setNodeLoggerName()
| void moveit::setNodeLoggerName | ( | const std::string & | name | ) |
Call once after creating a node to initialize logging namespaces.
{C++}
rclcpp::Node::SharedPtr node = rclcpp::Node::make_shared("move_group");
moveit::setNodeLoggerName(node->get_name());
void setNodeLoggerName(const std::string &name)
Call once after creating a node to initialize logging namespaces.
Definition logger.cpp:73
Definition at line 73 of file logger.cpp.
Here is the call graph for this function:

Here is the caller graph for this function: