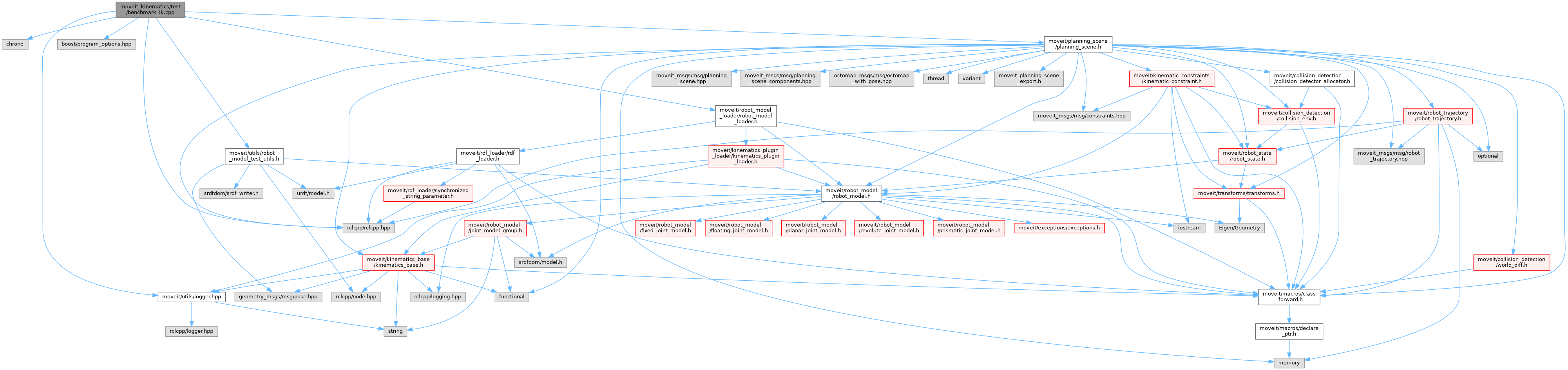
#include <chrono>#include <rclcpp/rclcpp.hpp>#include <boost/program_options.hpp>#include <moveit/robot_model_loader/robot_model_loader.hpp>#include <moveit/planning_scene/planning_scene.hpp>#include <moveit/utils/robot_model_test_utils.hpp>#include <moveit/utils/logger.hpp>
Include dependency graph for benchmark_ik.cpp:
Go to the source code of this file.
Functions | |
| int | main (int argc, char *argv[]) |
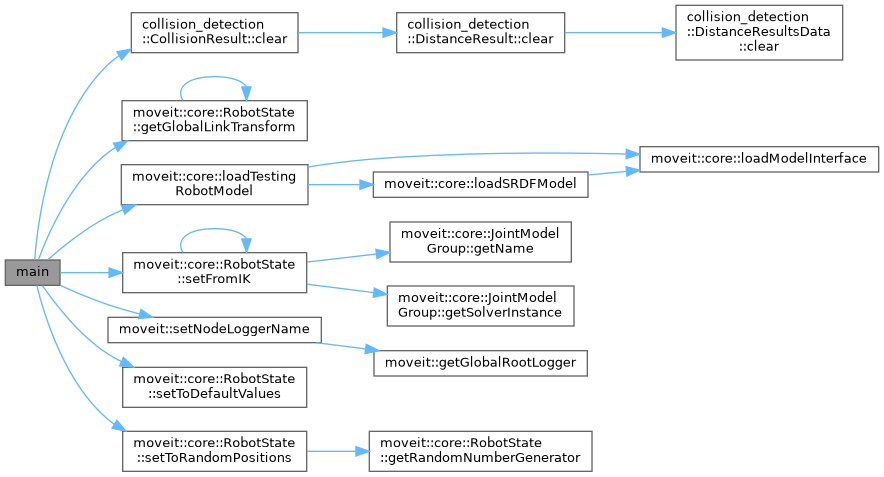
Function Documentation
◆ main()
| int main | ( | int | argc, |
| char * | argv[] | ||
| ) |