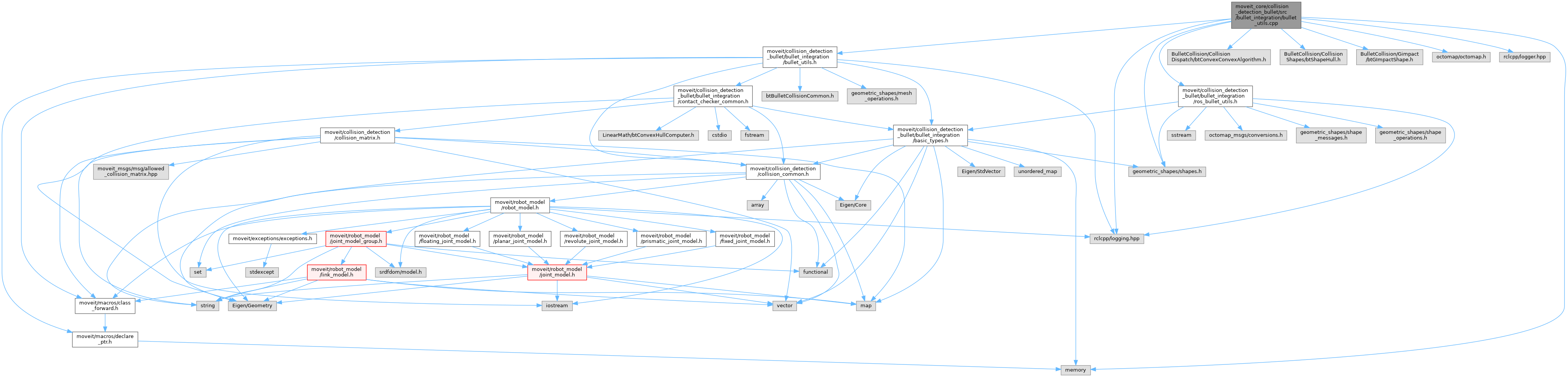
#include <moveit/collision_detection_bullet/bullet_integration/bullet_utils.hpp>#include <BulletCollision/CollisionDispatch/btConvexConvexAlgorithm.h>#include <BulletCollision/CollisionShapes/btShapeHull.h>#include <BulletCollision/Gimpact/btGImpactShape.h>#include <geometric_shapes/shapes.h>#include <memory>#include <octomap/octomap.h>#include <rclcpp/logger.hpp>#include <rclcpp/logging.hpp>#include <moveit/collision_detection_bullet/bullet_integration/ros_bullet_utils.hpp>
Include dependency graph for bullet_utils.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | collision_detection_bullet |
Functions | |
| bool | collision_detection_bullet::acmCheck (const std::string &body_1, const std::string &body_2, const collision_detection::AllowedCollisionMatrix *acm) |
| Allowed = true. | |
| btCollisionShape * | collision_detection_bullet::createShapePrimitive (const shapes::Box *geom, const CollisionObjectType &collision_object_type) |
| btCollisionShape * | collision_detection_bullet::createShapePrimitive (const shapes::Sphere *geom, const CollisionObjectType &collision_object_type) |
| btCollisionShape * | collision_detection_bullet::createShapePrimitive (const shapes::Cylinder *geom, const CollisionObjectType &collision_object_type) |
| btCollisionShape * | collision_detection_bullet::createShapePrimitive (const shapes::Cone *geom, const CollisionObjectType &collision_object_type) |
| btCollisionShape * | collision_detection_bullet::createShapePrimitive (const shapes::Mesh *geom, const CollisionObjectType &collision_object_type, CollisionObjectWrapper *cow) |
| btCollisionShape * | collision_detection_bullet::createShapePrimitive (const shapes::OcTree *geom, const CollisionObjectType &collision_object_type, CollisionObjectWrapper *cow) |
| void | collision_detection_bullet::updateCollisionObjectFilters (const std::vector< std::string > &active, CollisionObjectWrapper &cow) |
| Update a collision objects filters. | |
| CollisionObjectWrapperPtr | collision_detection_bullet::makeCastCollisionObject (const CollisionObjectWrapperPtr &cow) |
| void | collision_detection_bullet::addCollisionObjectToBroadphase (const CollisionObjectWrapperPtr &cow, const std::unique_ptr< btBroadphaseInterface > &broadphase, const std::unique_ptr< btCollisionDispatcher > &dispatcher) |
| Add the collision object to broadphase. | |
| btCollisionShape * | collision_detection_bullet::createShapePrimitive (const shapes::ShapeConstPtr &geom, const CollisionObjectType &collision_object_type, CollisionObjectWrapper *cow) |
| Casts a geometric shape into a btCollisionShape. | |