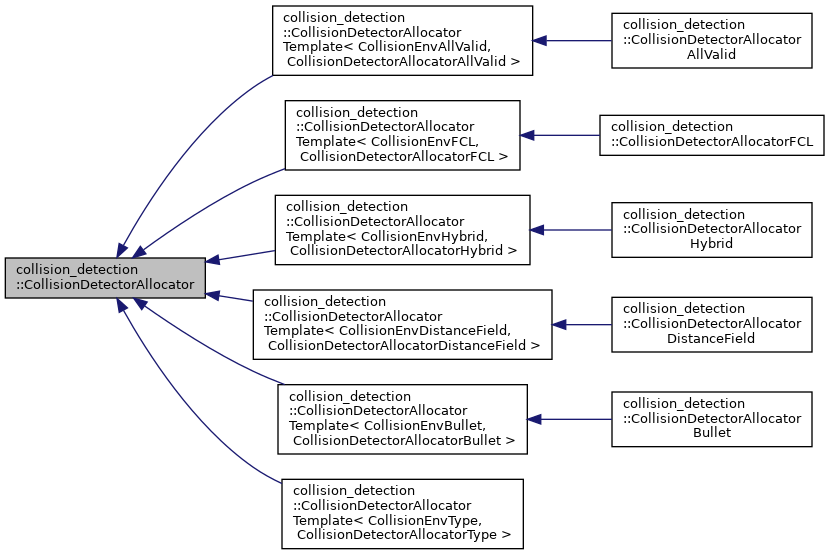
An allocator for a compatible CollisionWorld/CollisionRobot pair. More...
#include <collision_detector_allocator.hpp>
Public Member Functions | |
| virtual | ~CollisionDetectorAllocator () |
| virtual const std::string & | getName () const =0 |
| virtual CollisionEnvPtr | allocateEnv (const WorldPtr &world, const moveit::core::RobotModelConstPtr &robot_model) const =0 |
| virtual CollisionEnvPtr | allocateEnv (const CollisionEnvConstPtr &orig, const WorldPtr &world) const =0 |
| virtual CollisionEnvPtr | allocateEnv (const moveit::core::RobotModelConstPtr &robot_model) const =0 |
Detailed Description
An allocator for a compatible CollisionWorld/CollisionRobot pair.
Definition at line 47 of file collision_detector_allocator.hpp.
Constructor & Destructor Documentation
◆ ~CollisionDetectorAllocator()
|
inlinevirtual |
Definition at line 50 of file collision_detector_allocator.hpp.
Member Function Documentation
◆ allocateEnv() [1/3]
|
pure virtual |
create a new CollisionWorld by copying an existing CollisionWorld of the same type.s The world must be either the same world as used by \orig or a copy of that world which has not yet been modified.
Implemented in collision_detection::CollisionDetectorAllocatorTemplate< CollisionEnvType, CollisionDetectorAllocatorType >, collision_detection::CollisionDetectorAllocatorTemplate< CollisionEnvAllValid, CollisionDetectorAllocatorAllValid >, collision_detection::CollisionDetectorAllocatorTemplate< CollisionEnvBullet, CollisionDetectorAllocatorBullet >, collision_detection::CollisionDetectorAllocatorTemplate< CollisionEnvDistanceField, CollisionDetectorAllocatorDistanceField >, collision_detection::CollisionDetectorAllocatorTemplate< CollisionEnvFCL, CollisionDetectorAllocatorFCL >, and collision_detection::CollisionDetectorAllocatorTemplate< CollisionEnvHybrid, CollisionDetectorAllocatorHybrid >.
◆ allocateEnv() [2/3]
|
pure virtual |
create a new CollisionEnv given a robot_model with a new empty world
Implemented in collision_detection::CollisionDetectorAllocatorTemplate< CollisionEnvType, CollisionDetectorAllocatorType >, collision_detection::CollisionDetectorAllocatorTemplate< CollisionEnvAllValid, CollisionDetectorAllocatorAllValid >, collision_detection::CollisionDetectorAllocatorTemplate< CollisionEnvBullet, CollisionDetectorAllocatorBullet >, collision_detection::CollisionDetectorAllocatorTemplate< CollisionEnvDistanceField, CollisionDetectorAllocatorDistanceField >, collision_detection::CollisionDetectorAllocatorTemplate< CollisionEnvFCL, CollisionDetectorAllocatorFCL >, and collision_detection::CollisionDetectorAllocatorTemplate< CollisionEnvHybrid, CollisionDetectorAllocatorHybrid >.
◆ allocateEnv() [3/3]
|
pure virtual |
create a new CollisionWorld for checking collisions with the supplied world.
Implemented in collision_detection::CollisionDetectorAllocatorTemplate< CollisionEnvType, CollisionDetectorAllocatorType >, collision_detection::CollisionDetectorAllocatorTemplate< CollisionEnvAllValid, CollisionDetectorAllocatorAllValid >, collision_detection::CollisionDetectorAllocatorTemplate< CollisionEnvBullet, CollisionDetectorAllocatorBullet >, collision_detection::CollisionDetectorAllocatorTemplate< CollisionEnvDistanceField, CollisionDetectorAllocatorDistanceField >, collision_detection::CollisionDetectorAllocatorTemplate< CollisionEnvFCL, CollisionDetectorAllocatorFCL >, and collision_detection::CollisionDetectorAllocatorTemplate< CollisionEnvHybrid, CollisionDetectorAllocatorHybrid >.
◆ getName()
|
pure virtual |
A unique name identifying the CollisionWorld/CollisionRobot pairing.
Implemented in collision_detection::CollisionDetectorAllocatorTemplate< CollisionEnvType, CollisionDetectorAllocatorType >, collision_detection::CollisionDetectorAllocatorTemplate< CollisionEnvAllValid, CollisionDetectorAllocatorAllValid >, collision_detection::CollisionDetectorAllocatorTemplate< CollisionEnvBullet, CollisionDetectorAllocatorBullet >, collision_detection::CollisionDetectorAllocatorTemplate< CollisionEnvDistanceField, CollisionDetectorAllocatorDistanceField >, collision_detection::CollisionDetectorAllocatorTemplate< CollisionEnvFCL, CollisionDetectorAllocatorFCL >, and collision_detection::CollisionDetectorAllocatorTemplate< CollisionEnvHybrid, CollisionDetectorAllocatorHybrid >.
The documentation for this class was generated from the following file:
- moveit_core/collision_detection/include/moveit/collision_detection/collision_detector_allocator.hpp