#include <local_planner_component.hpp>
Public Member Functions | |
| LocalPlannerComponent (const rclcpp::NodeOptions &options) | |
| Constructor. | |
| ~LocalPlannerComponent () | |
| Destructor. | |
| bool | initialize () |
| void | executeIteration () |
| rclcpp::node_interfaces::NodeBaseInterface::SharedPtr | get_node_base_interface () |
Detailed Description
Class LocalPlannerComponent - ROS 2 component node that implements a local planner.
Definition at line 93 of file local_planner_component.hpp.
Constructor & Destructor Documentation
◆ LocalPlannerComponent()
| moveit::hybrid_planning::LocalPlannerComponent::LocalPlannerComponent | ( | const rclcpp::NodeOptions & | options | ) |
Constructor.
Definition at line 57 of file local_planner_component.cpp.

◆ ~LocalPlannerComponent()
|
inline |
Destructor.
Definition at line 100 of file local_planner_component.hpp.
Member Function Documentation
◆ executeIteration()
| void moveit::hybrid_planning::LocalPlannerComponent::executeIteration | ( | ) |
Handle the planners current job based on the internal state each iteration when the planner is started.
Definition at line 252 of file local_planner_component.cpp.

◆ get_node_base_interface()
|
inline |
Definition at line 124 of file local_planner_component.hpp.
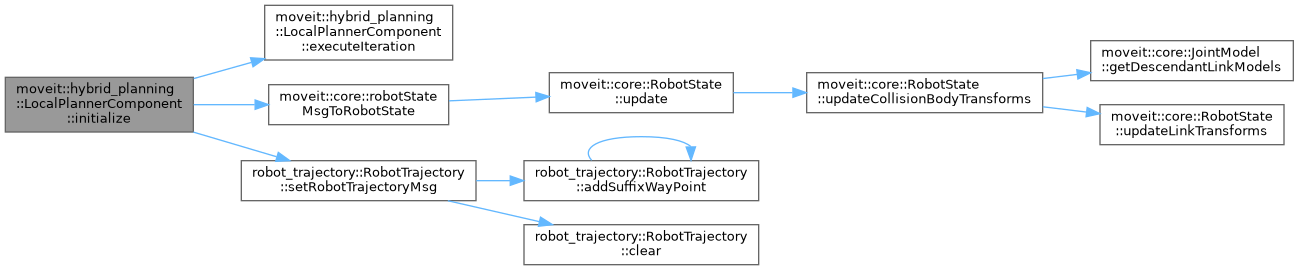
◆ initialize()
| bool moveit::hybrid_planning::LocalPlannerComponent::initialize | ( | ) |
Initialize and start planning scene monitor to listen to the planning scene topic. Load trajectory_operator and constraint solver plugin. Initialize ROS 2 interfaces
- Returns
- true if scene monitor and plugins are successfully initialized
Definition at line 69 of file local_planner_component.cpp.

The documentation for this class was generated from the following files:
- moveit_ros/hybrid_planning/local_planner/local_planner_component/include/moveit/local_planner/local_planner_component.hpp
- moveit_ros/hybrid_planning/local_planner/local_planner_component/src/local_planner_component.cpp