#include <threadsafe_state_storage.hpp>
Public Member Functions | |
| TSStateStorage (const moveit::core::RobotModelPtr &robot_model) | |
| TSStateStorage (const moveit::core::RobotState &start_state) | |
| ~TSStateStorage () | |
| moveit::core::RobotState * | getStateStorage () const |
Detailed Description
Definition at line 45 of file threadsafe_state_storage.hpp.
Constructor & Destructor Documentation
◆ TSStateStorage() [1/2]
| ompl_interface::TSStateStorage::TSStateStorage | ( | const moveit::core::RobotModelPtr & | robot_model | ) |
Definition at line 39 of file threadsafe_state_storage.cpp.
Here is the call graph for this function:

◆ TSStateStorage() [2/2]
| ompl_interface::TSStateStorage::TSStateStorage | ( | const moveit::core::RobotState & | start_state | ) |
Definition at line 45 of file threadsafe_state_storage.cpp.
◆ ~TSStateStorage()
| ompl_interface::TSStateStorage::~TSStateStorage | ( | ) |
Definition at line 49 of file threadsafe_state_storage.cpp.
Member Function Documentation
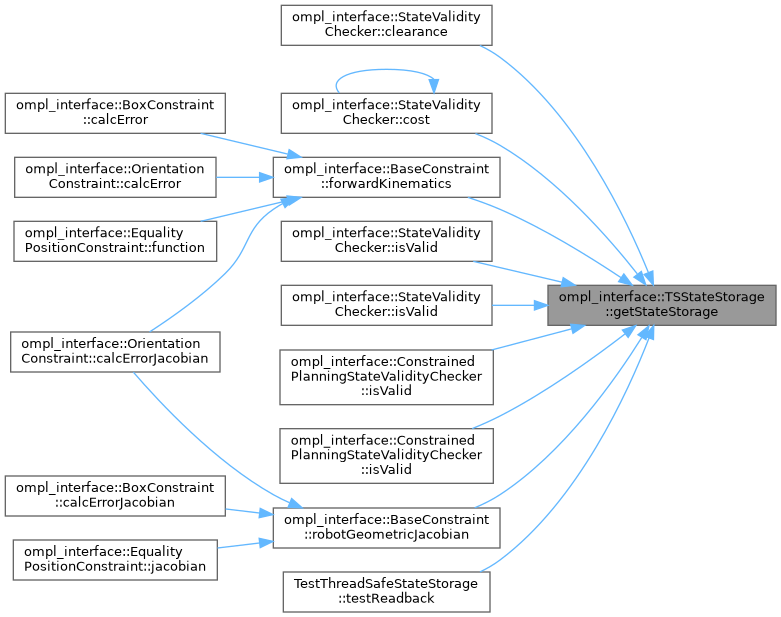
◆ getStateStorage()
| moveit::core::RobotState * ompl_interface::TSStateStorage::getStateStorage | ( | ) | const |
- Todo:
- use Thread Local Storage?
Definition at line 57 of file threadsafe_state_storage.cpp.
Here is the caller graph for this function:
The documentation for this class was generated from the following files:
- moveit_planners/ompl/ompl_interface/include/moveit/ompl_interface/detail/threadsafe_state_storage.hpp
- moveit_planners/ompl/ompl_interface/src/detail/threadsafe_state_storage.cpp