This class combines CartesianLimit and JointLimits into on single class. More...
#include <limits_container.hpp>
Public Member Functions | |
| LimitsContainer () | |
| bool | hasJointLimits () const |
| Return if this LimitsContainer has defined joint limits. | |
| void | setJointLimits (JointLimitsContainer &joint_limits) |
| Set joint limits. | |
| const JointLimitsContainer & | getJointLimitContainer () const |
| Obtain the Joint Limits from the container. | |
| void | printCartesianLimits () const |
| Prints the cartesian limits set by user. Default values for limits are 0.0. | |
| void | setCartesianLimits (cartesian_limits::Params &cartesian_limit) |
| Set cartesian limits. | |
| const cartesian_limits::Params & | getCartesianLimits () const |
| Return the cartesian limits. | |
Detailed Description
This class combines CartesianLimit and JointLimits into on single class.
Definition at line 48 of file limits_container.hpp.
Constructor & Destructor Documentation
◆ LimitsContainer()
| pilz_industrial_motion_planner::LimitsContainer::LimitsContainer | ( | ) |
Definition at line 49 of file limits_container.cpp.
Member Function Documentation
◆ getCartesianLimits()
| const cartesian_limits::Params & pilz_industrial_motion_planner::LimitsContainer::getCartesianLimits | ( | ) | const |
Return the cartesian limits.
- Returns
- the cartesian limits
Definition at line 83 of file limits_container.cpp.

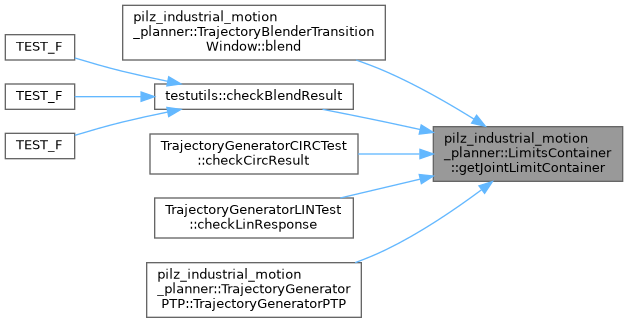
◆ getJointLimitContainer()
| const JointLimitsContainer & pilz_industrial_motion_planner::LimitsContainer::getJointLimitContainer | ( | ) | const |
Obtain the Joint Limits from the container.
- Returns
- the joint limits
Definition at line 64 of file limits_container.cpp.
◆ hasJointLimits()
| bool pilz_industrial_motion_planner::LimitsContainer::hasJointLimits | ( | ) | const |
Return if this LimitsContainer has defined joint limits.
- Returns
- True if container contains joint limits
Definition at line 53 of file limits_container.cpp.

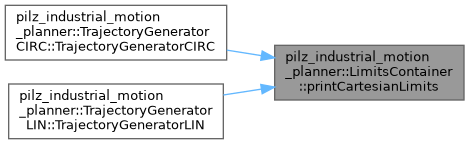
◆ printCartesianLimits()
| void pilz_industrial_motion_planner::LimitsContainer::printCartesianLimits | ( | ) | const |
Prints the cartesian limits set by user. Default values for limits are 0.0.
Definition at line 69 of file limits_container.cpp.
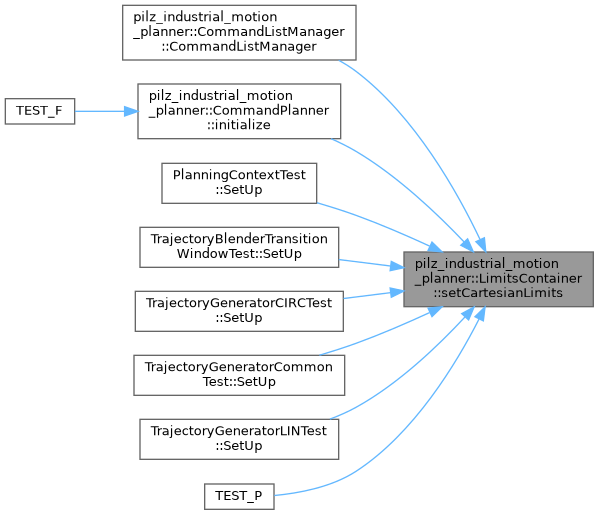
◆ setCartesianLimits()
| void pilz_industrial_motion_planner::LimitsContainer::setCartesianLimits | ( | cartesian_limits::Params & | cartesian_limit | ) |
Set cartesian limits.
- Parameters
-
cartesian_limit
Definition at line 77 of file limits_container.cpp.
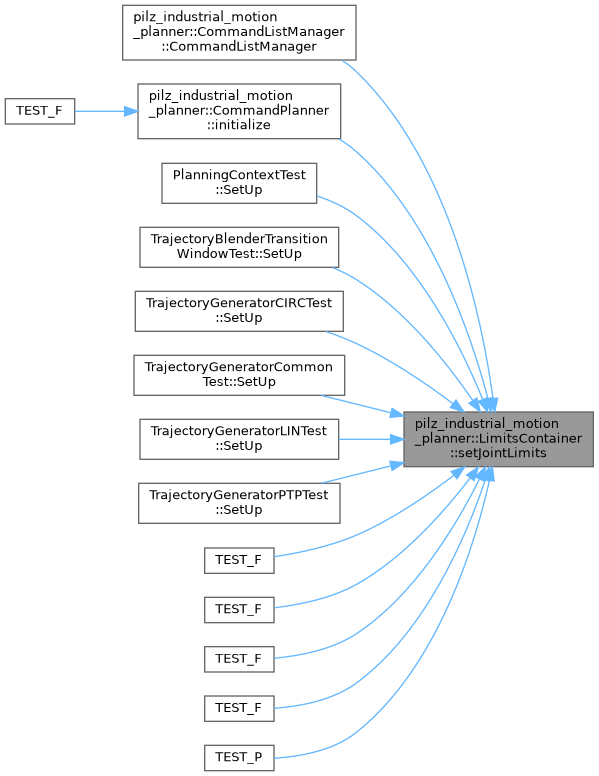
◆ setJointLimits()
| void pilz_industrial_motion_planner::LimitsContainer::setJointLimits | ( | JointLimitsContainer & | joint_limits | ) |
Set joint limits.
- Parameters
-
joint_limits
Definition at line 58 of file limits_container.cpp.
The documentation for this class was generated from the following files:
- moveit_planners/pilz_industrial_motion_planner/include/pilz_industrial_motion_planner/limits_container.hpp
- moveit_planners/pilz_industrial_motion_planner/src/limits_container.cpp