Container for JointLimits, essentially a map with convenience functions. Adds the ability to as for limits and get a common limit that unifies all given limits. More...
#include <joint_limits_container.hpp>
Public Member Functions | |
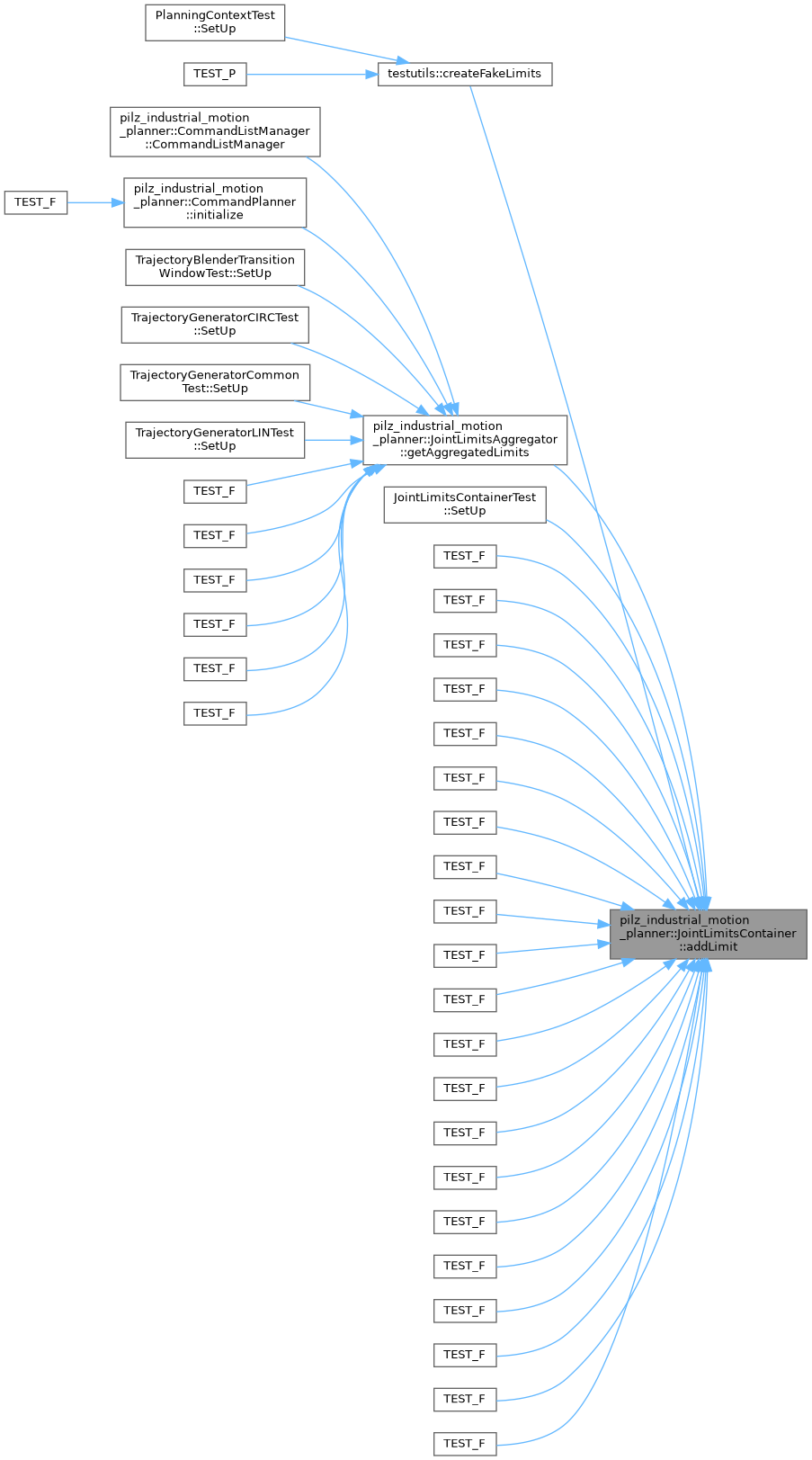
| bool | addLimit (const std::string &joint_name, JointLimit joint_limit) |
| Add a limit. | |
| bool | hasLimit (const std::string &joint_name) const |
| Check if there is a limit for a joint with the given name in this container. | |
| size_t | getCount () const |
| Get Number of limits in the container. | |
| bool | empty () const |
| Returns whether the container is empty. | |
| JointLimit | getCommonLimit () const |
| Returns joint limit fusion of all(position, velocity, acceleration,
deceleration) limits for all joint. There are cases where the most strict limit of all limits is needed. If there are no matching limits, the flag has_[position|velocity|...]_limits is set to false. | |
| JointLimit | getCommonLimit (const std::vector< std::string > &joint_names) const |
| Returns joint limit fusion of all(position, velocity, acceleration,
deceleration) limits for given joints. There are cases where the most strict limit of all limits is needed. If there are no matching limits, the flag has_[position|velocity|...]_limits is set to false. | |
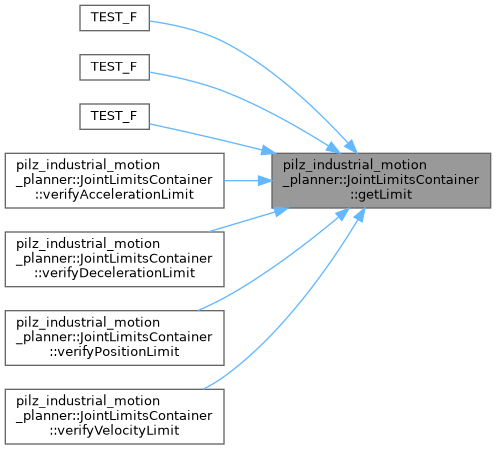
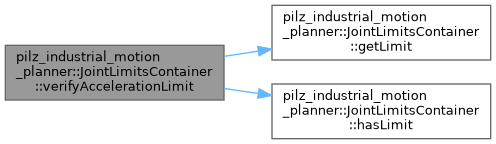
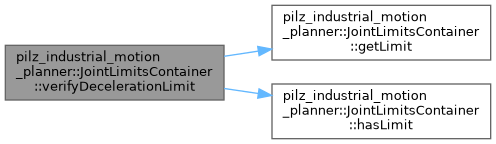
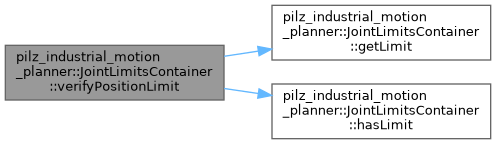
| JointLimit | getLimit (const std::string &joint_name) const |
| getLimit get the limit for the given joint name | |
| std::map< std::string, JointLimit >::const_iterator | begin () const |
| ConstIterator to the underlying data structure. | |
| std::map< std::string, JointLimit >::const_iterator | end () const |
| ConstIterator to the underlying data structure. | |
| bool | verifyPositionLimit (const std::string &joint_name, double joint_position) const |
| verify position limit of single joint | |
| bool | verifyVelocityLimit (const std::string &joint_name, double joint_velocity) const |
| verify velocity limit of single joint | |
| bool | verifyAccelerationLimit (const std::string &joint_name, double joint_acceleration) const |
| verify acceleration limit of single joint | |
| bool | verifyDecelerationLimit (const std::string &joint_name, double joint_acceleration) const |
| verify deceleration limit of single joint | |
Protected Attributes | |
| std::map< std::string, JointLimit > | container_ |
| Actual container object containing the data. | |
Detailed Description
Container for JointLimits, essentially a map with convenience functions. Adds the ability to as for limits and get a common limit that unifies all given limits.
Definition at line 51 of file joint_limits_container.hpp.
Member Function Documentation
◆ addLimit()
| bool pilz_industrial_motion_planner::JointLimitsContainer::addLimit | ( | const std::string & | joint_name, |
| pilz_industrial_motion_planner::JointLimit | joint_limit | ||
| ) |
Add a limit.
- Parameters
-
joint_name Name if the joint this limit belongs to joint_limit Limit of the joint
- Returns
- true if the limit was added, false if joint_limit.has_deceleration_limit && joint_limit.max_deceleration >= 0
Definition at line 52 of file joint_limits_container.cpp.
◆ begin()
| std::map< std::string, JointLimit >::const_iterator pilz_industrial_motion_planner::JointLimitsContainer::begin | ( | ) | const |
ConstIterator to the underlying data structure.
- Returns
Definition at line 109 of file joint_limits_container.cpp.
◆ empty()
| bool pilz_industrial_motion_planner::JointLimitsContainer::empty | ( | ) | const |
Returns whether the container is empty.
- Returns
- true if empty, false otherwise
Definition at line 79 of file joint_limits_container.cpp.
◆ end()
| std::map< std::string, JointLimit >::const_iterator pilz_industrial_motion_planner::JointLimitsContainer::end | ( | ) | const |
ConstIterator to the underlying data structure.
- Returns
Definition at line 114 of file joint_limits_container.cpp.
◆ getCommonLimit() [1/2]
| JointLimit pilz_industrial_motion_planner::JointLimitsContainer::getCommonLimit | ( | ) | const |
Returns joint limit fusion of all(position, velocity, acceleration, deceleration) limits for all joint. There are cases where the most strict limit of all limits is needed. If there are no matching limits, the flag has_[position|velocity|...]_limits is set to false.
- Returns
- joint limit
Definition at line 84 of file joint_limits_container.cpp.
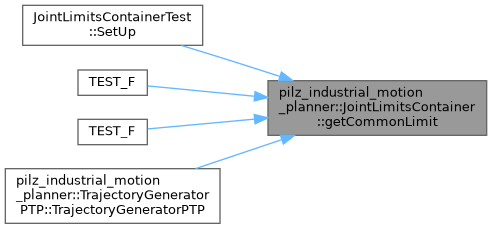
◆ getCommonLimit() [2/2]
| JointLimit pilz_industrial_motion_planner::JointLimitsContainer::getCommonLimit | ( | const std::vector< std::string > & | joint_names | ) | const |
Returns joint limit fusion of all(position, velocity, acceleration, deceleration) limits for given joints. There are cases where the most strict limit of all limits is needed. If there are no matching limits, the flag has_[position|velocity|...]_limits is set to false.
- Parameters
-
joint_names
- Returns
- joint limit
- Exceptions
-
std::out_of_range if a joint limit with this name does not exist
Definition at line 94 of file joint_limits_container.cpp.
◆ getCount()
| size_t pilz_industrial_motion_planner::JointLimitsContainer::getCount | ( | ) | const |
Get Number of limits in the container.
- Returns
- Number of limits in the container
Definition at line 74 of file joint_limits_container.cpp.
◆ getLimit()
| JointLimit pilz_industrial_motion_planner::JointLimitsContainer::getLimit | ( | const std::string & | joint_name | ) | const |
getLimit get the limit for the given joint name
- Parameters
-
joint_name
- Returns
- joint limit
- Exceptions
-
std::out_of_range if a joint limit with this name does not exist
Definition at line 104 of file joint_limits_container.cpp.
◆ hasLimit()
| bool pilz_industrial_motion_planner::JointLimitsContainer::hasLimit | ( | const std::string & | joint_name | ) | const |
Check if there is a limit for a joint with the given name in this container.
- Parameters
-
joint_name Name of the joint
Definition at line 69 of file joint_limits_container.cpp.
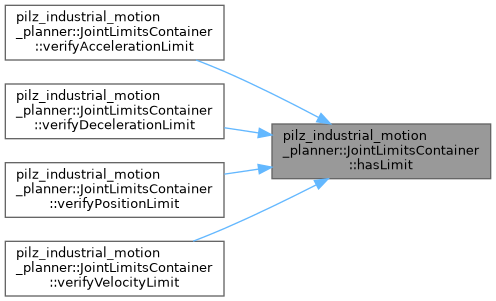
◆ verifyAccelerationLimit()
| bool pilz_industrial_motion_planner::JointLimitsContainer::verifyAccelerationLimit | ( | const std::string & | joint_name, |
| double | joint_acceleration | ||
| ) | const |
verify acceleration limit of single joint
- Parameters
-
joint_name joint_acceleration
- Returns
- true if within limits, false otherwise
Definition at line 131 of file joint_limits_container.cpp.
◆ verifyDecelerationLimit()
| bool pilz_industrial_motion_planner::JointLimitsContainer::verifyDecelerationLimit | ( | const std::string & | joint_name, |
| double | joint_acceleration | ||
| ) | const |
verify deceleration limit of single joint
- Parameters
-
joint_name joint_acceleration
- Returns
- true if within limits, false otherwise
Definition at line 137 of file joint_limits_container.cpp.
◆ verifyPositionLimit()
| bool pilz_industrial_motion_planner::JointLimitsContainer::verifyPositionLimit | ( | const std::string & | joint_name, |
| double | joint_position | ||
| ) | const |
verify position limit of single joint
- Parameters
-
joint_name joint_position
- Returns
- true if within limits, false otherwise
Definition at line 119 of file joint_limits_container.cpp.
◆ verifyVelocityLimit()
| bool pilz_industrial_motion_planner::JointLimitsContainer::verifyVelocityLimit | ( | const std::string & | joint_name, |
| double | joint_velocity | ||
| ) | const |
verify velocity limit of single joint
- Parameters
-
joint_name joint_velocity
- Returns
- true if within limits, false otherwise
Definition at line 125 of file joint_limits_container.cpp.
Member Data Documentation
◆ container_
|
protected |
Actual container object containing the data.
Definition at line 169 of file joint_limits_container.hpp.
The documentation for this class was generated from the following files:
- moveit_planners/pilz_industrial_motion_planner/include/pilz_industrial_motion_planner/joint_limits_container.hpp
- moveit_planners/pilz_industrial_motion_planner/src/joint_limits_container.cpp