moveit2
The MoveIt Motion Planning Framework for ROS 2.
Loading...
Searching...
No Matches
moveit_planners
pilz_industrial_motion_planner
src
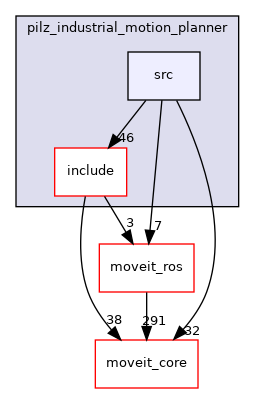
src Directory Reference
Directory dependency graph for src:
Files
command_list_manager.cpp
joint_limits_aggregator.cpp
joint_limits_container.cpp
joint_limits_validator.cpp
limits_container.cpp
move_group_sequence_action.cpp
move_group_sequence_service.cpp
path_circle_generator.cpp
pilz_industrial_motion_planner.cpp
plan_components_builder.cpp
planning_context_loader.cpp
planning_context_loader_circ.cpp
planning_context_loader_lin.cpp
planning_context_loader_ptp.cpp
trajectory_blender_transition_window.cpp
trajectory_functions.cpp
trajectory_generator.cpp
trajectory_generator_circ.cpp
trajectory_generator_lin.cpp
trajectory_generator_ptp.cpp
velocity_profile_atrap.cpp
Generated by
1.9.8