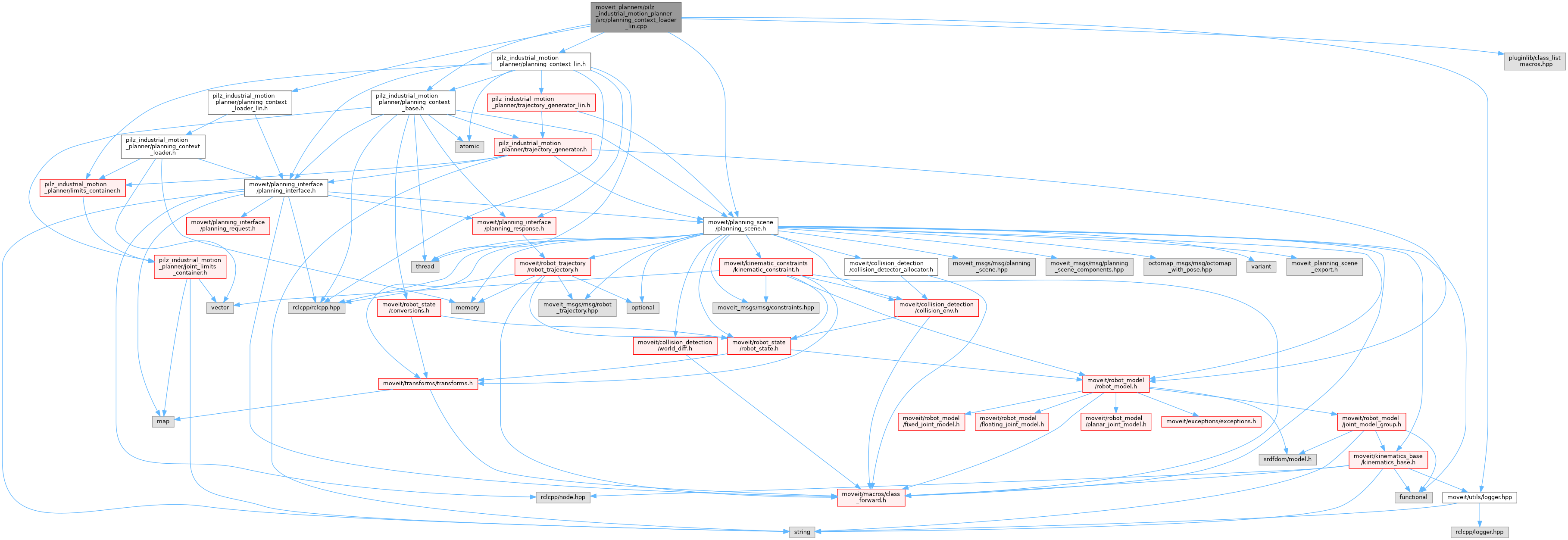
#include <pilz_industrial_motion_planner/planning_context_loader_lin.hpp>#include <moveit/planning_scene/planning_scene.hpp>#include <pilz_industrial_motion_planner/planning_context_base.hpp>#include <pilz_industrial_motion_planner/planning_context_lin.hpp>#include <moveit/utils/logger.hpp>#include <pluginlib/class_list_macros.hpp>
Include dependency graph for planning_context_loader_lin.cpp: