moveit2
The MoveIt Motion Planning Framework for ROS 2.
Loading...
Searching...
No Matches
moveit_ros
planning
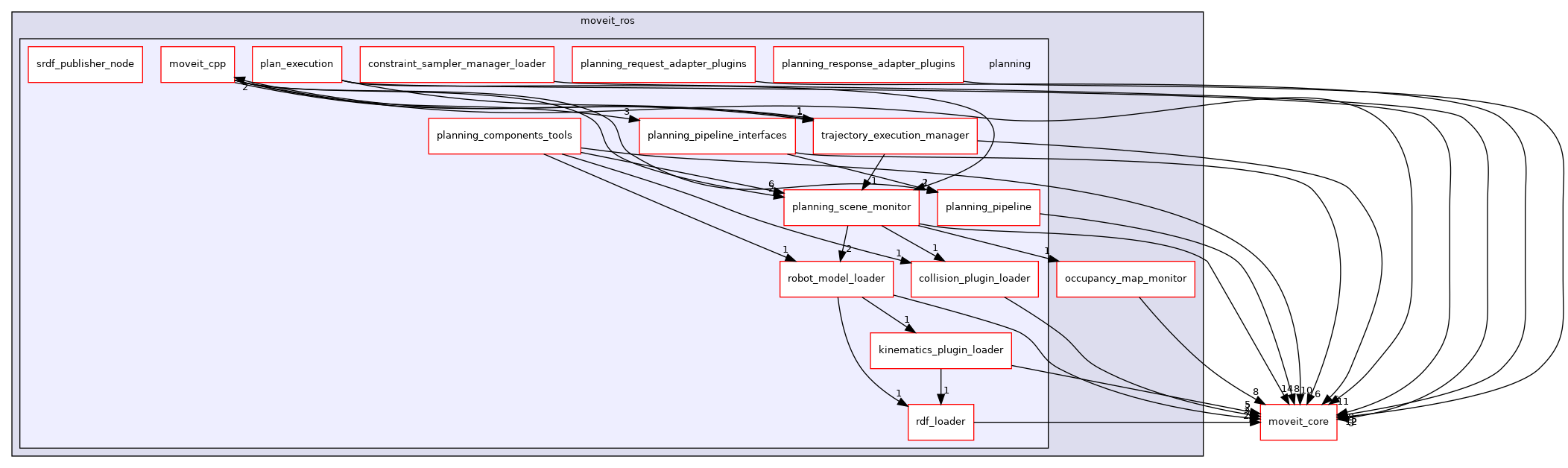
planning Directory Reference
Directory dependency graph for planning:
Directories
collision_plugin_loader
constraint_sampler_manager_loader
kinematics_plugin_loader
moveit_cpp
plan_execution
planning_components_tools
planning_pipeline
planning_pipeline_interfaces
planning_request_adapter_plugins
planning_response_adapter_plugins
planning_scene_monitor
rdf_loader
robot_model_loader
srdf_publisher_node
trajectory_execution_manager
Generated by
1.9.8