#include <moveit/ompl_interface/ompl_interface.hpp>#include <moveit/ompl_interface/detail/constraints_library.hpp>#include <moveit/robot_model_loader/robot_model_loader.hpp>#include <moveit/planning_scene_monitor/planning_scene_monitor.hpp>#include <moveit/robot_state/conversions.hpp>#include <moveit/kinematic_constraints/utils.hpp>#include <moveit/utils/message_checks.hpp>#include <boost/math/constants/constants.hpp>#include <sstream>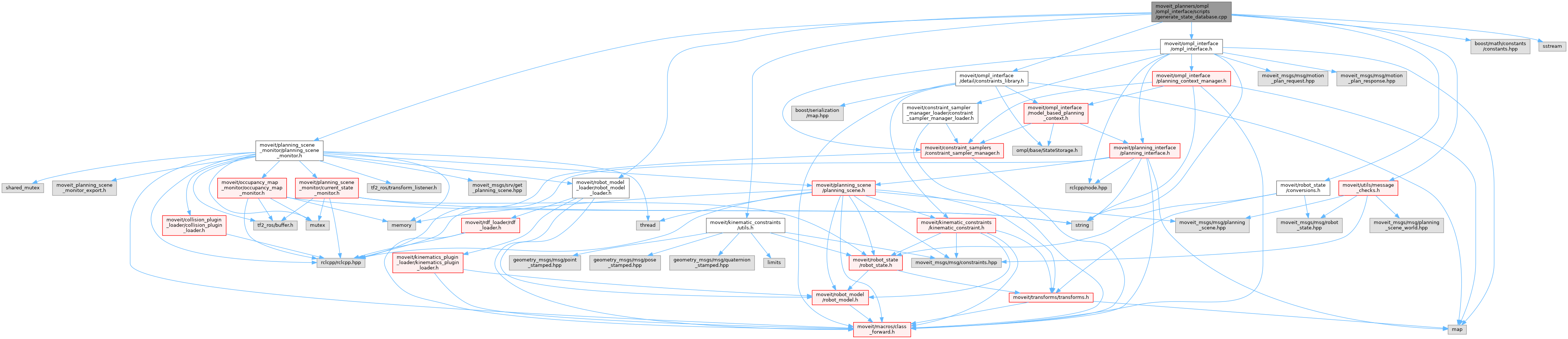
Go to the source code of this file.
Classes | |
| struct | GenerateStateDatabaseParameters |
Functions | |
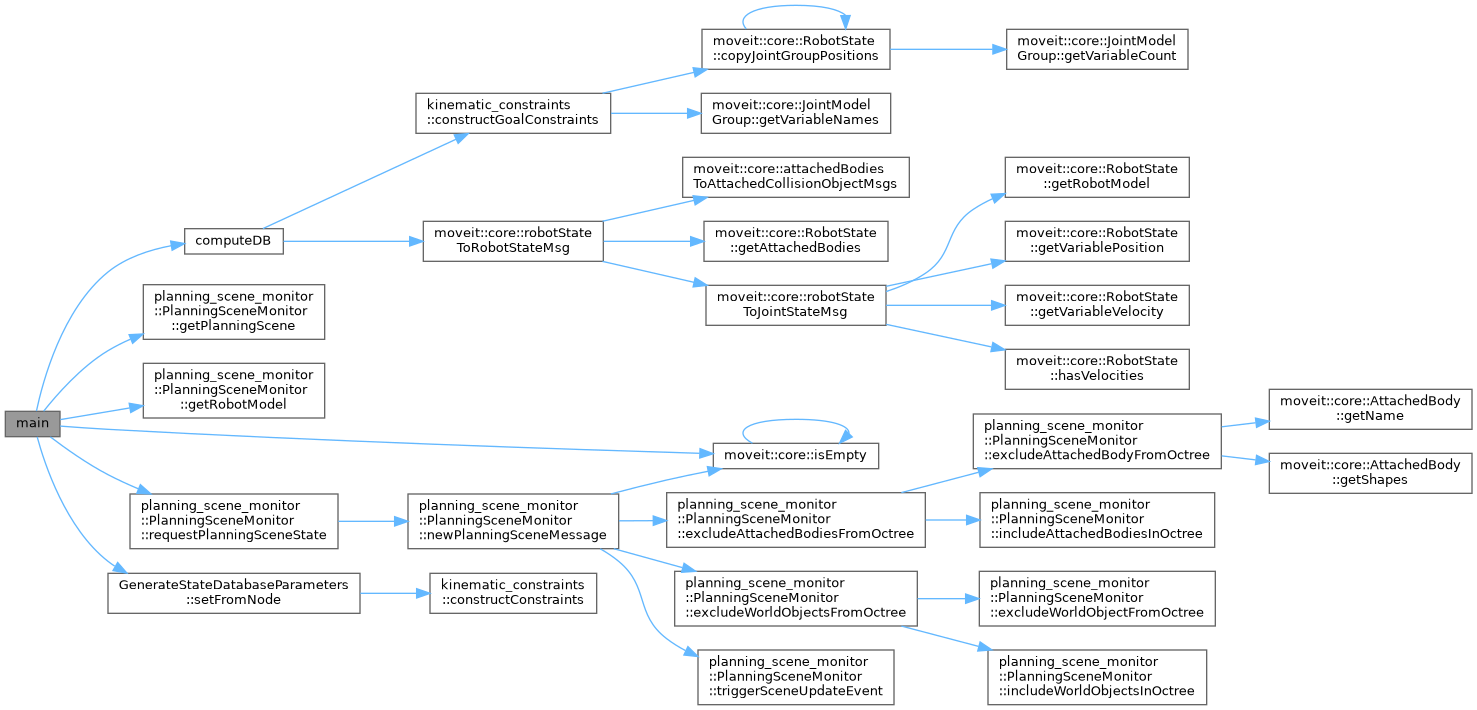
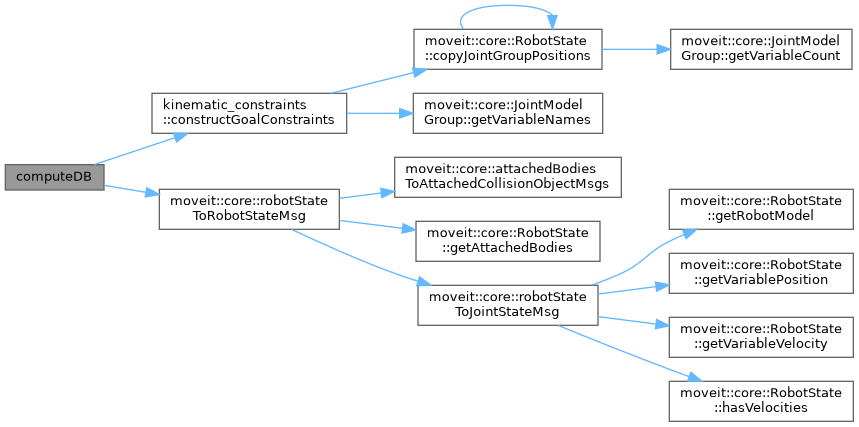
| void | computeDB (const rclcpp::Node::SharedPtr &node, const planning_scene::PlanningScenePtr &scene, struct GenerateStateDatabaseParameters ¶ms) |
| int | main (int argc, char **argv) |
Function Documentation
◆ computeDB()
| void computeDB | ( | const rclcpp::Node::SharedPtr & | node, |
| const planning_scene::PlanningScenePtr & | scene, | ||
| struct GenerateStateDatabaseParameters & | params | ||
| ) |
Definition at line 138 of file generate_state_database.cpp.

◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Generates a database of states that follow the given constraints. An example of the constraint yaml that should be loaded to rosparam: """ name: constraint_name constraint_ids: [constraint_1, constraint_2] constraints: constraint_1: type: orientation frame_id: world link_name: tool0 orientation: [0, 0, 0] # [r, p, y] tolerances: [0.01, 0.01, 3.15] weight: 1.0 constraint_2: type: position frame_id: base_link link_name: tool0 target_offset: [0.1, 0.1, 0.1] # [x, y, z] region: x: [0.1, 0.4] # [min, max] y: [0.2, 0.3] z: [0.1, 0.6] weight: 1.0 """
Definition at line 198 of file generate_state_database.cpp.