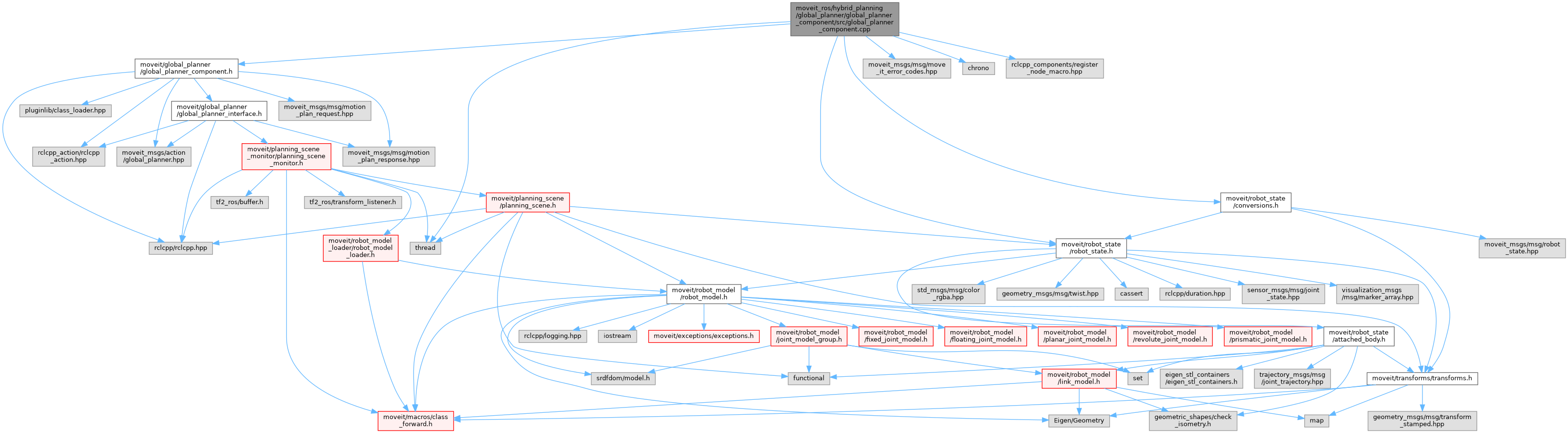
#include <moveit/global_planner/global_planner_component.hpp>#include <moveit/robot_state/robot_state.hpp>#include <moveit/robot_state/conversions.hpp>#include <moveit_msgs/msg/move_it_error_codes.hpp>#include <chrono>#include <thread>#include <rclcpp_components/register_node_macro.hpp>
Include dependency graph for global_planner_component.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | moveit |
| Main namespace for MoveIt. | |
| namespace | moveit::hybrid_planning |
Variables | |
| const std::string | moveit::hybrid_planning::UNDEFINED = "<undefined>" |