moveit_msgs::msg::MotionPlanRequest features to key the trajectory cache on. More...
#include <warehouse_ros/message_collection.h>#include <moveit/move_group_interface/move_group_interface.hpp>#include <moveit_msgs/msg/robot_trajectory.hpp>#include <moveit_msgs/msg/motion_plan_request.hpp>#include <moveit/trajectory_cache/features/features_interface.hpp>
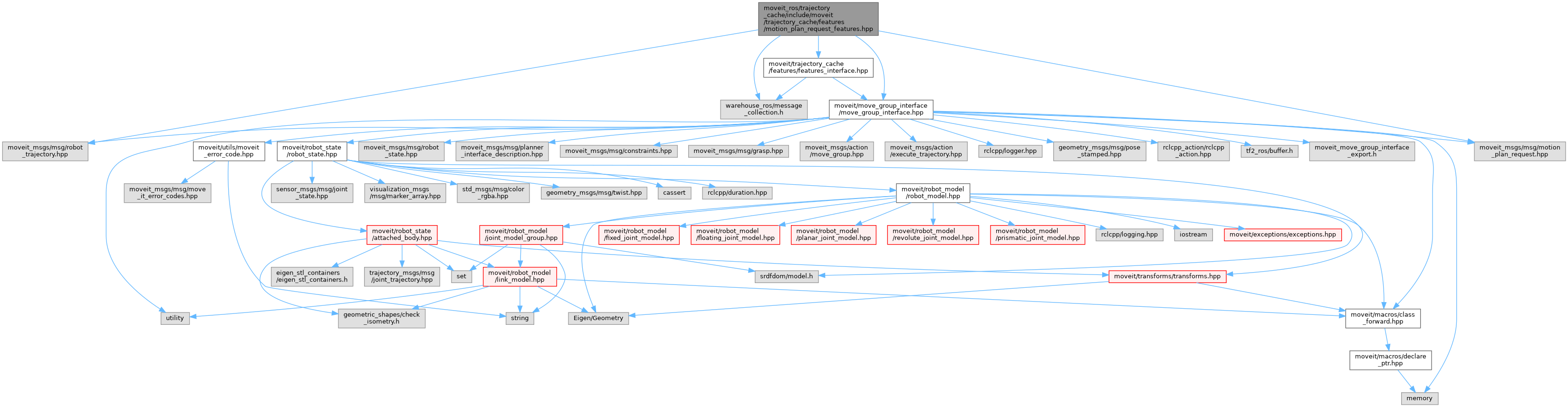
Include dependency graph for motion_plan_request_features.hpp:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | moveit_ros::trajectory_cache::WorkspaceFeatures |
Extracts group name and details of the workspace_parameters field in the plan request. More... | |
| class | moveit_ros::trajectory_cache::StartStateJointStateFeatures |
Extracts details of the joint state from the start_state field in the plan request. More... | |
| class | moveit_ros::trajectory_cache::MaxSpeedAndAccelerationFeatures |
| Extracts max velocity and acceleration scaling, and cartesian speed limits from the plan request. More... | |
| class | moveit_ros::trajectory_cache::GoalConstraintsFeatures |
Extracts features from the goal_constraints field in the plan request. More... | |
| class | moveit_ros::trajectory_cache::PathConstraintsFeatures |
Extracts features from the path_constraints field in the plan request. More... | |
| class | moveit_ros::trajectory_cache::TrajectoryConstraintsFeatures |
Extracts features from the trajectory_constraints field in the plan request. More... | |
Namespaces | |
| namespace | moveit_ros |
| namespace | moveit_ros::trajectory_cache |
Detailed Description
moveit_msgs::msg::MotionPlanRequest features to key the trajectory cache on.
Definition in file motion_plan_request_features.hpp.