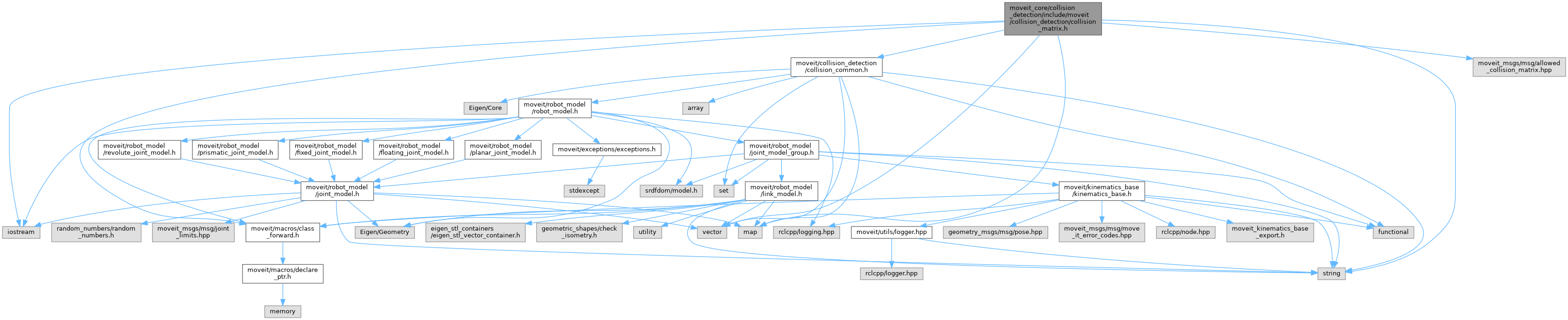
#include <moveit/collision_detection/collision_common.h>#include <moveit/macros/class_forward.h>#include <moveit_msgs/msg/allowed_collision_matrix.hpp>#include <iostream>#include <vector>#include <string>#include <map>
Include dependency graph for collision_matrix.h:
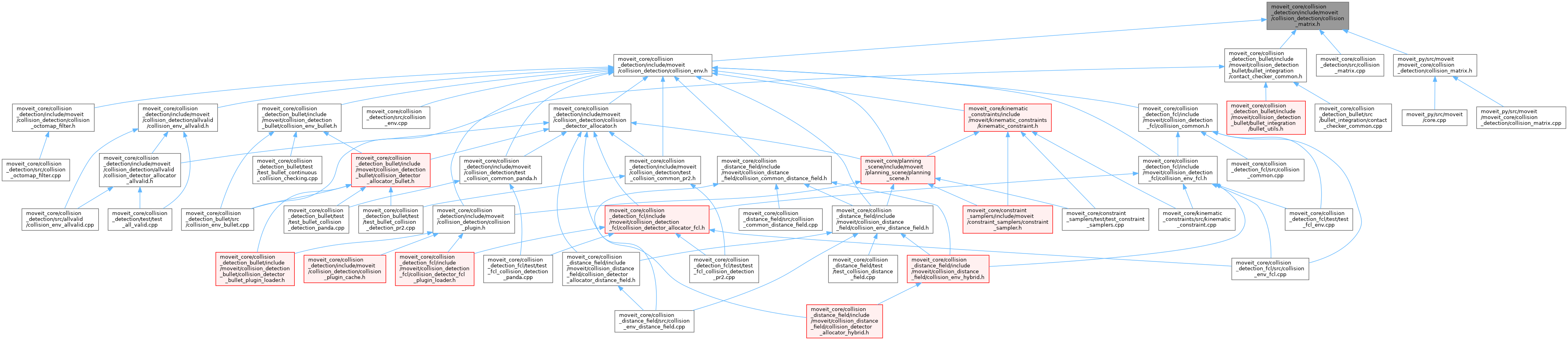
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | collision_detection::AllowedCollisionMatrix |
| Definition of a structure for the allowed collision matrix. All elements in the collision world are referred to by their names. This class represents which collisions are allowed to happen and which are not. More... | |
Namespaces | |
| collision_detection | |
| collision_detection::AllowedCollision | |
| Any pair of bodies can have a collision state associated to it. | |
Typedefs | |
| using | collision_detection::DecideContactFn = std::function< bool(collision_detection::Contact &)> |
| Signature of predicate that decides whether a contact is allowed or not (when AllowedCollision::Type is CONDITIONAL) More... | |
Functions | |
| collision_detection::MOVEIT_CLASS_FORWARD (AllowedCollisionMatrix) | |