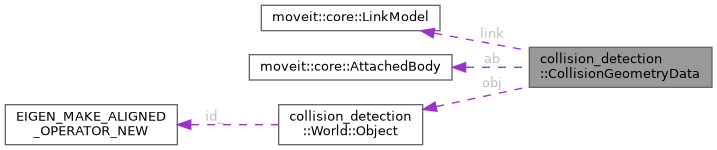
Wrapper around world, link and attached objects' geometry data. More...
#include <collision_common.hpp>
Public Member Functions | |
| CollisionGeometryData (const moveit::core::LinkModel *link, int index) | |
| Constructor for a robot link collision geometry object. | |
| CollisionGeometryData (const moveit::core::AttachedBody *ab, int index) | |
| Constructor for a new collision geometry object which is attached to the robot. | |
| CollisionGeometryData (const World::Object *obj, int index) | |
| Constructor for a new world collision geometry. | |
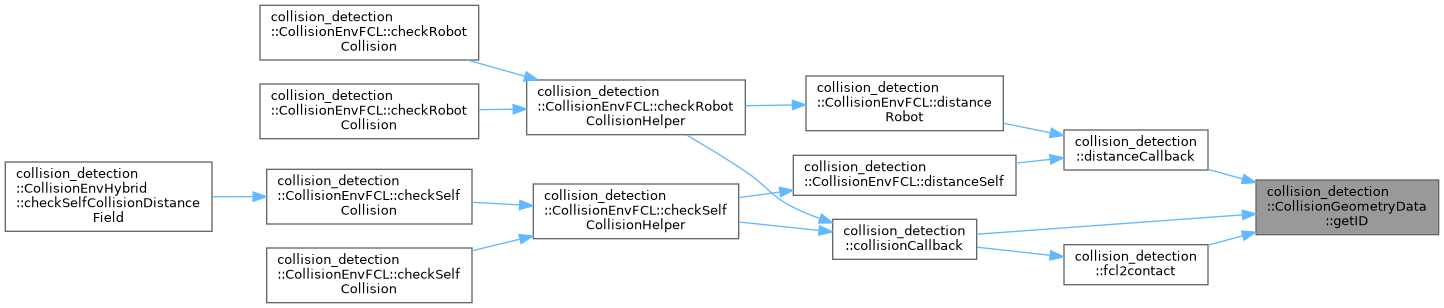
| const std::string & | getID () const |
| Returns the name which is saved in the member pointed to in ptr. | |
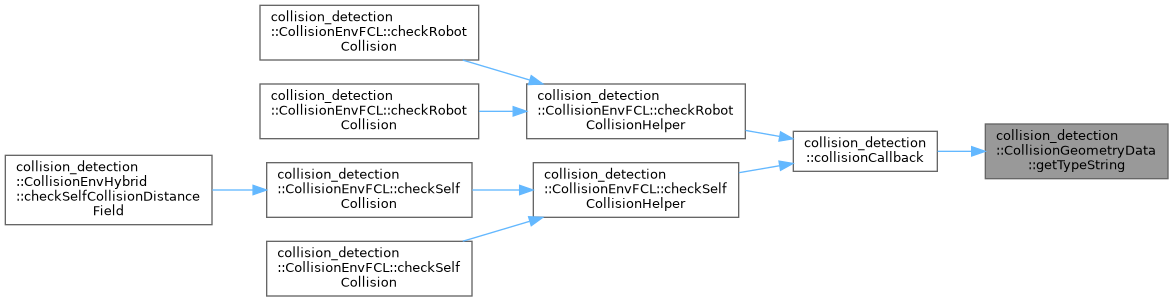
| std::string | getTypeString () const |
| Returns a string of the corresponding type. | |
| bool | sameObject (const CollisionGeometryData &other) const |
| Check if two CollisionGeometryData objects point to the same source object. | |
Public Attributes | ||
| BodyType | type | |
| Indicates the body type of the object. | ||
| int | shape_index | |
| Multiple CollisionGeometryData objects construct a collision object. The collision object refers to an array of coordinate transformations at a certain start index. The index of the transformation of a child CollisionGeometryData object is then given by adding the parent collision object index and the shape_index of a geometry data object. | ||
| union { | ||
| const moveit::core::LinkModel * link | ||
| const moveit::core::AttachedBody * ab | ||
| const World::Object * obj | ||
| const void * raw | ||
| } | ptr | |
| Points to the type of body which contains the geometry. | ||
Detailed Description
Wrapper around world, link and attached objects' geometry data.
Definition at line 63 of file collision_common.hpp.
Constructor & Destructor Documentation
◆ CollisionGeometryData() [1/3]
|
inline |
Constructor for a robot link collision geometry object.
Definition at line 66 of file collision_common.hpp.
◆ CollisionGeometryData() [2/3]
|
inline |
Constructor for a new collision geometry object which is attached to the robot.
Definition at line 73 of file collision_common.hpp.
◆ CollisionGeometryData() [3/3]
|
inline |
Constructor for a new world collision geometry.
Definition at line 80 of file collision_common.hpp.
Member Function Documentation
◆ getID()
|
inline |
Returns the name which is saved in the member pointed to in ptr.
Definition at line 86 of file collision_common.hpp.
◆ getTypeString()
|
inline |
Returns a string of the corresponding type.
Definition at line 101 of file collision_common.hpp.
◆ sameObject()
|
inline |
Check if two CollisionGeometryData objects point to the same source object.
Definition at line 116 of file collision_common.hpp.

Member Data Documentation
◆ ab
| const moveit::core::AttachedBody* collision_detection::CollisionGeometryData::ab |
Definition at line 134 of file collision_common.hpp.
◆ link
| const moveit::core::LinkModel* collision_detection::CollisionGeometryData::link |
Definition at line 133 of file collision_common.hpp.
◆ obj
| const World::Object* collision_detection::CollisionGeometryData::obj |
Definition at line 135 of file collision_common.hpp.
◆ [union]
| union { ... } collision_detection::CollisionGeometryData::ptr |
Points to the type of body which contains the geometry.
◆ raw
| const void* collision_detection::CollisionGeometryData::raw |
Definition at line 136 of file collision_common.hpp.
◆ shape_index
| int collision_detection::CollisionGeometryData::shape_index |
Multiple CollisionGeometryData objects construct a collision object. The collision object refers to an array of coordinate transformations at a certain start index. The index of the transformation of a child CollisionGeometryData object is then given by adding the parent collision object index and the shape_index of a geometry data object.
Definition at line 128 of file collision_common.hpp.
◆ type
| BodyType collision_detection::CollisionGeometryData::type |
Indicates the body type of the object.
Definition at line 122 of file collision_common.hpp.
The documentation for this struct was generated from the following file:
- moveit_core/collision_detection_fcl/include/moveit/collision_detection_fcl/collision_common.hpp