A link from the robot. Contains the constant transform applied to the link and its geometry. More...
#include <link_model.hpp>
Public Member Functions | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW | LinkModel (const std::string &name, size_t link_index) |
| Construct a link model named name. | |
| ~LinkModel () | |
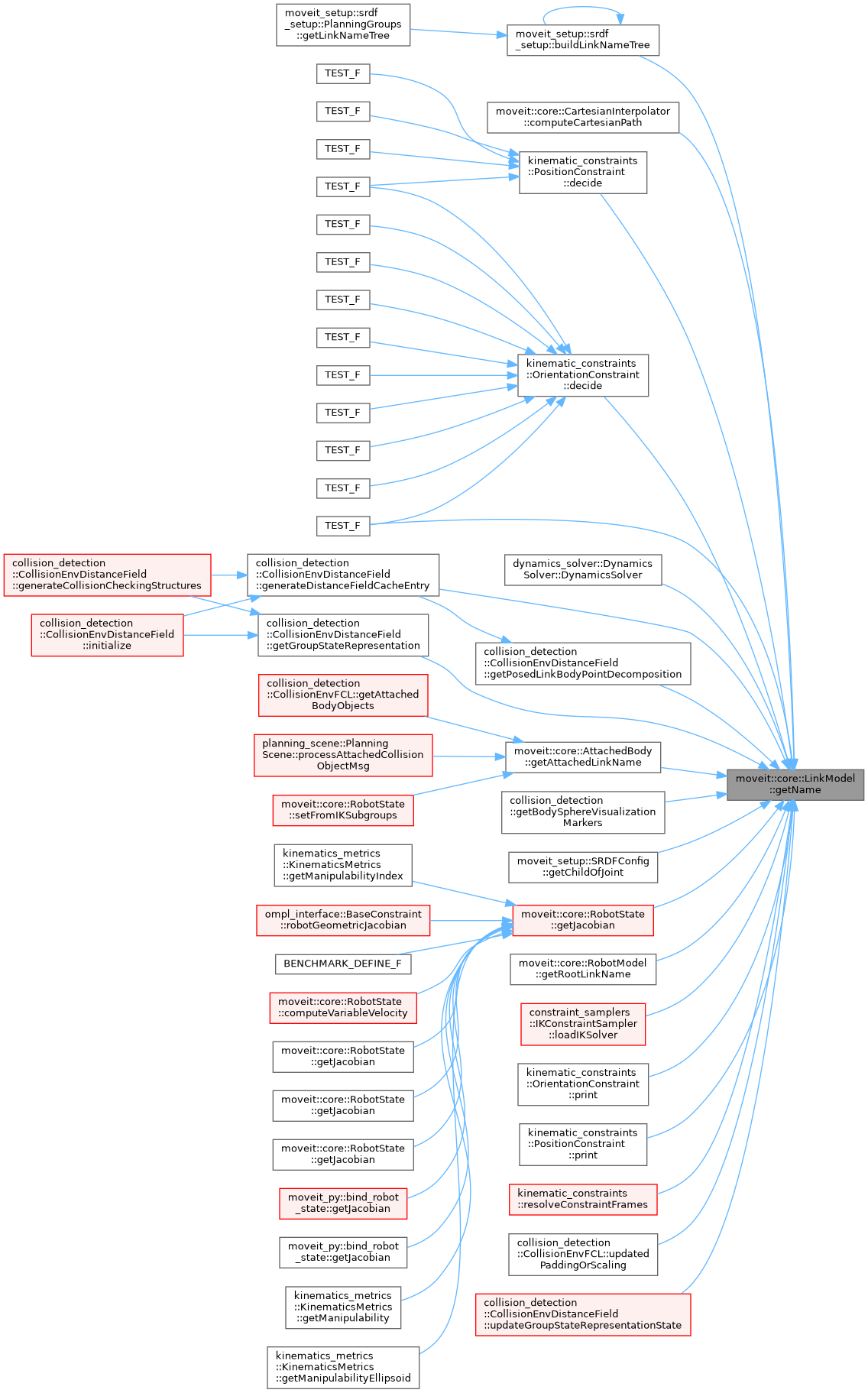
| const std::string & | getName () const |
| The name of this link. | |
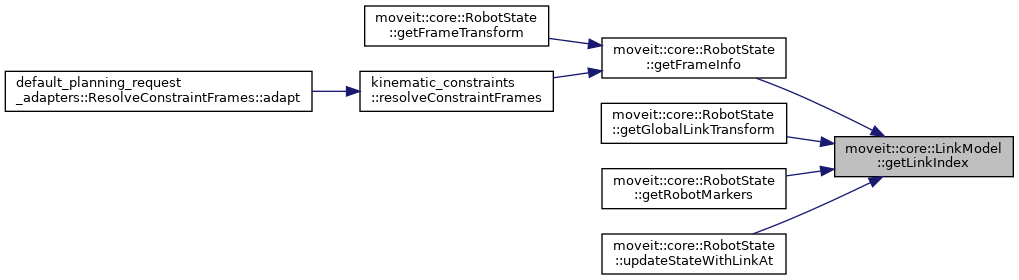
| size_t | getLinkIndex () const |
| The index of this joint when traversing the kinematic tree in depth first fashion. | |
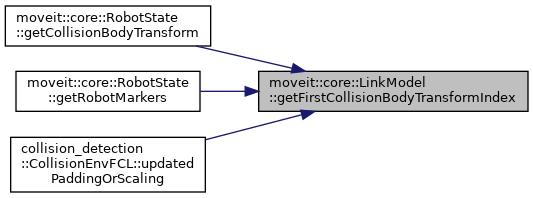
| int | getFirstCollisionBodyTransformIndex () const |
| void | setFirstCollisionBodyTransformIndex (int index) |
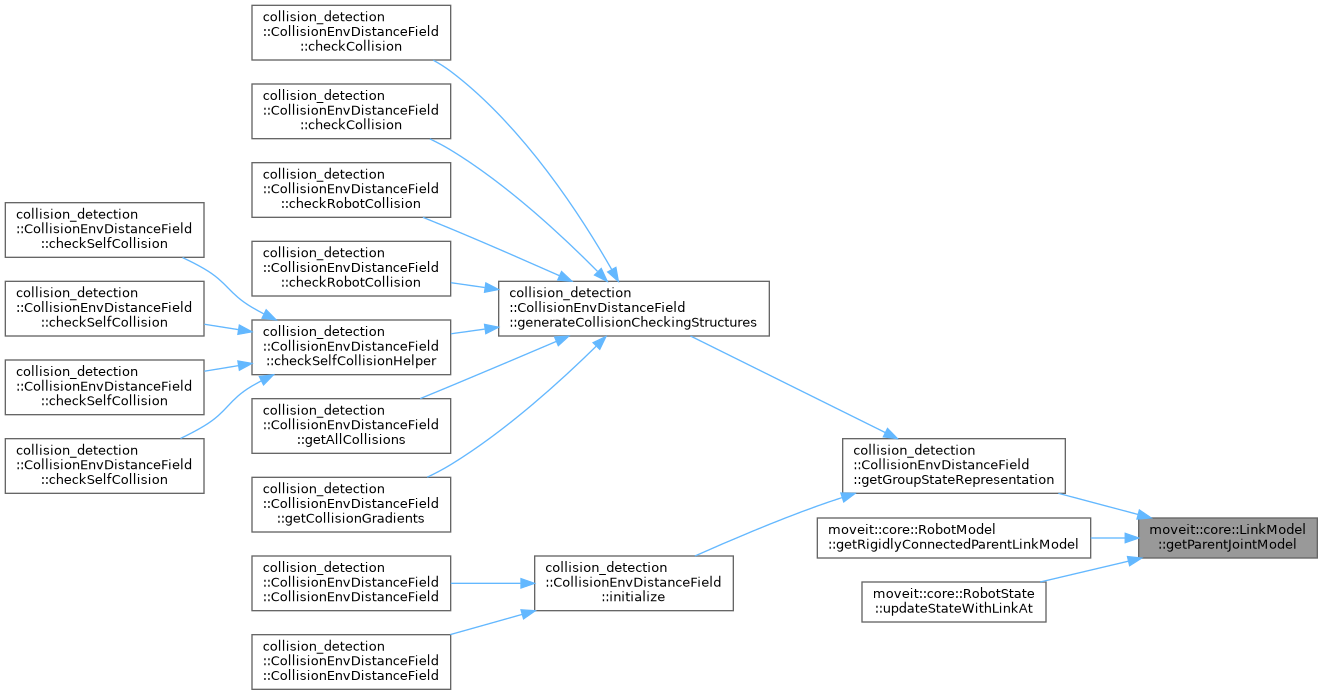
| const JointModel * | getParentJointModel () const |
| Get the joint model whose child this link is. There will always be a parent joint. | |
| void | setParentJointModel (const JointModel *joint) |
| const LinkModel * | getParentLinkModel () const |
| Get the link model whose child this link is (through some joint). There may not always be a parent link (nullptr is returned for the root link) | |
| void | setParentLinkModel (const LinkModel *link) |
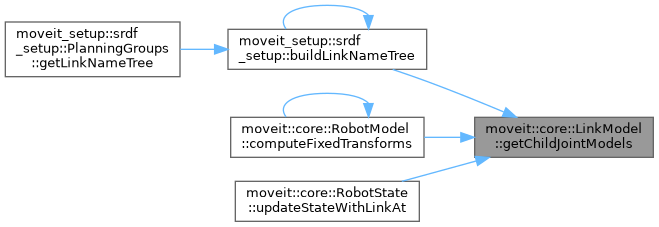
| const std::vector< const JointModel * > & | getChildJointModels () const |
| A link may have 0 or more child joints. From those joints there will certainly be other descendant links. | |
| void | addChildJointModel (const JointModel *joint) |
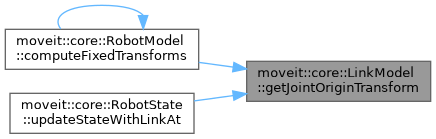
| const Eigen::Isometry3d & | getJointOriginTransform () const |
| When transforms are computed for this link, they are usually applied to the link's origin. The joint origin transform acts as an offset – it is pre-applied before any other transform. The transform is guaranteed to be a valid isometry. | |
| bool | jointOriginTransformIsIdentity () const |
| bool | parentJointIsFixed () const |
| void | setJointOriginTransform (const Eigen::Isometry3d &transform) |
| const EigenSTL::vector_Isometry3d & | getCollisionOriginTransforms () const |
| In addition to the link transform, the geometry of a link that is used for collision checking may have a different offset itself, with respect to the origin. The transform is guaranteed to be a valid isometry. | |
| const std::vector< int > & | areCollisionOriginTransformsIdentity () const |
| Return flags for each transform specifying whether they are identity or not. | |
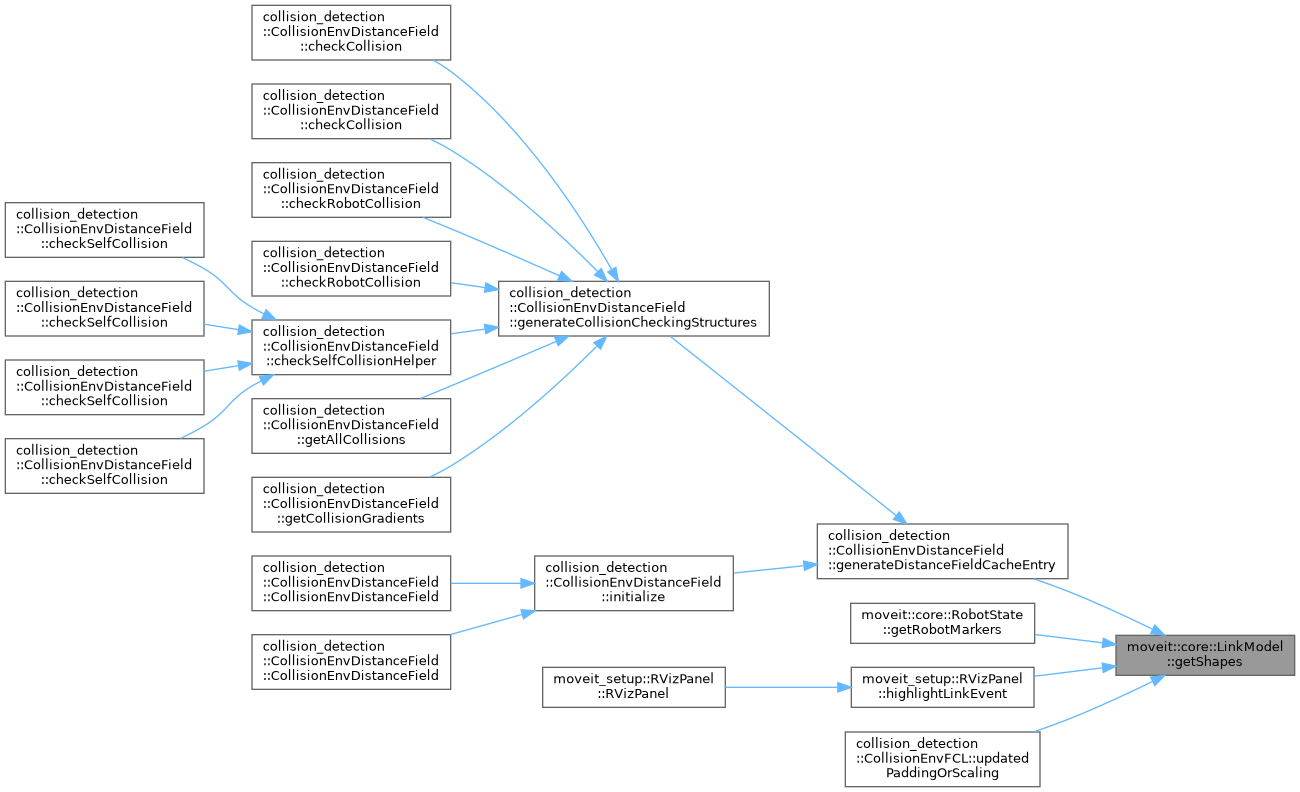
| const std::vector< shapes::ShapeConstPtr > & | getShapes () const |
| Get shape associated to the collision geometry for this link. | |
| void | setGeometry (const std::vector< shapes::ShapeConstPtr > &shapes, const EigenSTL::vector_Isometry3d &origins) |
| const Eigen::Vector3d & | getShapeExtentsAtOrigin () const |
| Get the extents of the link's geometry (dimensions of axis-aligned bounding box around all shapes that make up the link, when the link is positioned at origin – only collision origin transforms are considered) | |
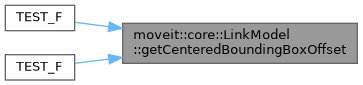
| const Eigen::Vector3d & | getCenteredBoundingBoxOffset () const |
| Get the offset of the center of the bounding box of this link when the link is positioned at origin. | |
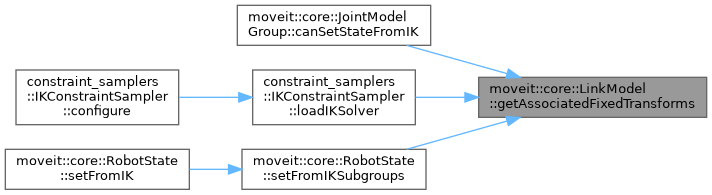
| const LinkTransformMap & | getAssociatedFixedTransforms () const |
| Get the set of links that are attached to this one via fixed transforms. The returned transforms are guaranteed to be valid isometries. | |
| void | addAssociatedFixedTransform (const LinkModel *link_model, const Eigen::Isometry3d &transform) |
| Remember that link_model is attached to this link using a fixed transform. | |
| const std::string & | getVisualMeshFilename () const |
| Get the filename of the mesh resource used for visual display of this link. | |
| const Eigen::Vector3d & | getVisualMeshScale () const |
| Get the scale of the mesh resource for this link. | |
| const Eigen::Isometry3d & | getVisualMeshOrigin () const |
| Get the transform for the visual mesh origin. | |
| void | setVisualMesh (const std::string &visual_mesh, const Eigen::Isometry3d &origin, const Eigen::Vector3d &scale) |
Detailed Description
A link from the robot. Contains the constant transform applied to the link and its geometry.
Definition at line 71 of file link_model.hpp.
Constructor & Destructor Documentation
◆ LinkModel()
| moveit::core::LinkModel::LinkModel | ( | const std::string & | name, |
| size_t | link_index | ||
| ) |
Construct a link model named name.
- Parameters
-
[in] name The name of the link [in] link_index The link index in the RobotModel
Definition at line 47 of file link_model.cpp.
◆ ~LinkModel()
|
default |
Member Function Documentation
◆ addAssociatedFixedTransform()
|
inline |
Remember that link_model is attached to this link using a fixed transform.
Definition at line 205 of file link_model.hpp.
◆ addChildJointModel()
|
inline |
Definition at line 133 of file link_model.hpp.
◆ areCollisionOriginTransformsIdentity()
|
inline |
Return flags for each transform specifying whether they are identity or not.
Definition at line 170 of file link_model.hpp.
◆ getAssociatedFixedTransforms()
|
inline |
Get the set of links that are attached to this one via fixed transforms. The returned transforms are guaranteed to be valid isometries.
Definition at line 199 of file link_model.hpp.
◆ getCenteredBoundingBoxOffset()
|
inline |
Get the offset of the center of the bounding box of this link when the link is positioned at origin.
Definition at line 192 of file link_model.hpp.
◆ getChildJointModels()
|
inline |
A link may have 0 or more child joints. From those joints there will certainly be other descendant links.
Definition at line 128 of file link_model.hpp.
◆ getCollisionOriginTransforms()
|
inline |
In addition to the link transform, the geometry of a link that is used for collision checking may have a different offset itself, with respect to the origin. The transform is guaranteed to be a valid isometry.
Definition at line 164 of file link_model.hpp.
◆ getFirstCollisionBodyTransformIndex()
|
inline |
◆ getJointOriginTransform()
|
inline |
When transforms are computed for this link, they are usually applied to the link's origin. The joint origin transform acts as an offset – it is pre-applied before any other transform. The transform is guaranteed to be a valid isometry.
Definition at line 143 of file link_model.hpp.
◆ getLinkIndex()
|
inline |
The index of this joint when traversing the kinematic tree in depth first fashion.
Definition at line 92 of file link_model.hpp.
◆ getName()
|
inline |
The name of this link.
Definition at line 86 of file link_model.hpp.
◆ getParentJointModel()
|
inline |
Get the joint model whose child this link is. There will always be a parent joint.
Definition at line 108 of file link_model.hpp.
◆ getParentLinkModel()
|
inline |
Get the link model whose child this link is (through some joint). There may not always be a parent link (nullptr is returned for the root link)
Definition at line 117 of file link_model.hpp.

◆ getShapeExtentsAtOrigin()
|
inline |
Get the extents of the link's geometry (dimensions of axis-aligned bounding box around all shapes that make up the link, when the link is positioned at origin – only collision origin transforms are considered)
Definition at line 186 of file link_model.hpp.

◆ getShapes()
|
inline |
Get shape associated to the collision geometry for this link.
Definition at line 176 of file link_model.hpp.
◆ getVisualMeshFilename()
|
inline |
Get the filename of the mesh resource used for visual display of this link.
Definition at line 212 of file link_model.hpp.

◆ getVisualMeshOrigin()
|
inline |
Get the transform for the visual mesh origin.
Definition at line 224 of file link_model.hpp.

◆ getVisualMeshScale()
|
inline |
Get the scale of the mesh resource for this link.
Definition at line 218 of file link_model.hpp.

◆ jointOriginTransformIsIdentity()
|
inline |
Definition at line 148 of file link_model.hpp.
◆ parentJointIsFixed()
|
inline |
Definition at line 153 of file link_model.hpp.
◆ setFirstCollisionBodyTransformIndex()
|
inline |
Definition at line 102 of file link_model.hpp.
◆ setGeometry()
| void moveit::core::LinkModel::setGeometry | ( | const std::vector< shapes::ShapeConstPtr > & | shapes, |
| const EigenSTL::vector_Isometry3d & | origins | ||
| ) |

◆ setJointOriginTransform()
| void moveit::core::LinkModel::setJointOriginTransform | ( | const Eigen::Isometry3d & | transform | ) |
Definition at line 61 of file link_model.cpp.
◆ setParentJointModel()
| void moveit::core::LinkModel::setParentJointModel | ( | const JointModel * | joint | ) |

◆ setParentLinkModel()
|
inline |
Definition at line 122 of file link_model.hpp.
◆ setVisualMesh()
| void moveit::core::LinkModel::setVisualMesh | ( | const std::string & | visual_mesh, |
| const Eigen::Isometry3d & | origin, | ||
| const Eigen::Vector3d & | scale | ||
| ) |
Definition at line 122 of file link_model.cpp.
The documentation for this class was generated from the following files:
- moveit_core/robot_model/include/moveit/robot_model/link_model.hpp
- moveit_core/robot_model/src/link_model.cpp