Callback structure for both discrete and continuous broadphase collision pair. More...
#include <bullet_utils.hpp>

Public Member Functions | |
| BroadphaseContactResultCallback (ContactTestData &collisions, double contact_distance, const collision_detection::AllowedCollisionMatrix *acm, bool self, bool cast=false) | |
| ~BroadphaseContactResultCallback ()=default | |
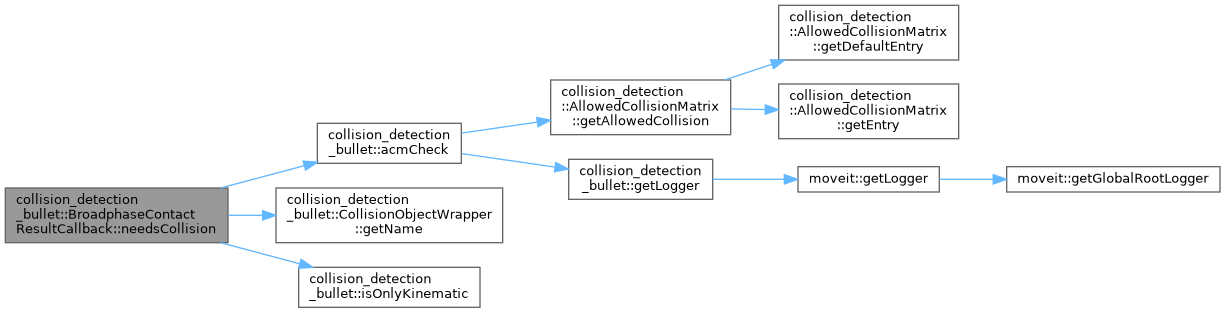
| bool | needsCollision (const CollisionObjectWrapper *cow0, const CollisionObjectWrapper *cow1) const |
| This callback is used for each overlapping pair in a pair cache of the broadphase interface to check if a collision check should done for the pair. | |
| btScalar | addSingleResult (btManifoldPoint &cp, const btCollisionObjectWrapper *colObj0Wrap, int partId0, int index0, const btCollisionObjectWrapper *colObj1Wrap, int partId1, int index1) |
| This callback is used after btManifoldResult processed a collision result. | |
Public Attributes | |
| ContactTestData & | collisions_ |
| double | contact_distance_ |
| const collision_detection::AllowedCollisionMatrix * | acm_ { nullptr } |
| bool | self_ |
| Indicates if the callback is used for only self-collision checking. | |
| bool | cast_ { false } |
| Indicates if the callback is used for casted collisions. | |
Detailed Description
Callback structure for both discrete and continuous broadphase collision pair.
/e needsCollision is the callback executed before a narrowphase check is executed. /e addSingleResult is the callback executed after the narrowphase check delivers a result.
Definition at line 530 of file bullet_utils.hpp.
Constructor & Destructor Documentation
◆ BroadphaseContactResultCallback()
|
inline |
Definition at line 542 of file bullet_utils.hpp.
◆ ~BroadphaseContactResultCallback()
|
default |
Member Function Documentation
◆ addSingleResult()
| btScalar collision_detection_bullet::BroadphaseContactResultCallback::addSingleResult | ( | btManifoldPoint & | cp, |
| const btCollisionObjectWrapper * | colObj0Wrap, | ||
| int | partId0, | ||
| int | index0, | ||
| const btCollisionObjectWrapper * | colObj1Wrap, | ||
| int | partId1, | ||
| int | index1 | ||
| ) |
This callback is used after btManifoldResult processed a collision result.
Definition at line 480 of file bullet_utils.cpp.


◆ needsCollision()
|
inline |
This callback is used for each overlapping pair in a pair cache of the broadphase interface to check if a collision check should done for the pair.
Definition at line 553 of file bullet_utils.hpp.

Member Data Documentation
◆ acm_
| const collision_detection::AllowedCollisionMatrix* collision_detection_bullet::BroadphaseContactResultCallback::acm_ { nullptr } |
Definition at line 534 of file bullet_utils.hpp.
◆ cast_
| bool collision_detection_bullet::BroadphaseContactResultCallback::cast_ { false } |
Indicates if the callback is used for casted collisions.
Definition at line 540 of file bullet_utils.hpp.
◆ collisions_
| ContactTestData& collision_detection_bullet::BroadphaseContactResultCallback::collisions_ |
Definition at line 532 of file bullet_utils.hpp.
◆ contact_distance_
| double collision_detection_bullet::BroadphaseContactResultCallback::contact_distance_ |
Definition at line 533 of file bullet_utils.hpp.
◆ self_
| bool collision_detection_bullet::BroadphaseContactResultCallback::self_ |
Indicates if the callback is used for only self-collision checking.
Definition at line 537 of file bullet_utils.hpp.
The documentation for this struct was generated from the following files:
- moveit_core/collision_detection_bullet/include/moveit/collision_detection_bullet/bullet_integration/bullet_utils.hpp
- moveit_core/collision_detection_bullet/src/bullet_integration/bullet_utils.cpp