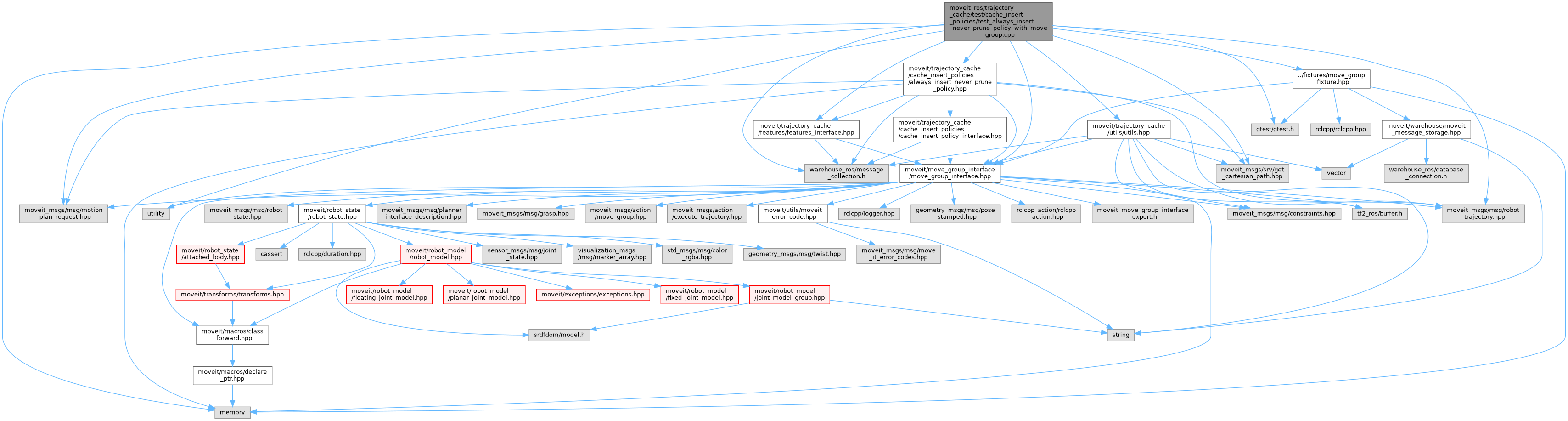
#include <memory>#include <utility>#include <gtest/gtest.h>#include <warehouse_ros/message_collection.h>#include <moveit/move_group_interface/move_group_interface.hpp>#include <moveit_msgs/msg/motion_plan_request.hpp>#include <moveit_msgs/msg/robot_trajectory.hpp>#include <moveit_msgs/srv/get_cartesian_path.hpp>#include <moveit/trajectory_cache/cache_insert_policies/always_insert_never_prune_policy.hpp>#include <moveit/trajectory_cache/features/features_interface.hpp>#include <moveit/trajectory_cache/utils/utils.hpp>#include "../fixtures/move_group_fixture.hpp"
Include dependency graph for test_always_insert_never_prune_policy_with_move_group.cpp:
Go to the source code of this file.
Functions | |
| int | main (int argc, char **argv) |
Detailed Description
Definition in file test_always_insert_never_prune_policy_with_move_group.cpp.
Function Documentation
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 442 of file test_always_insert_never_prune_policy_with_move_group.cpp.