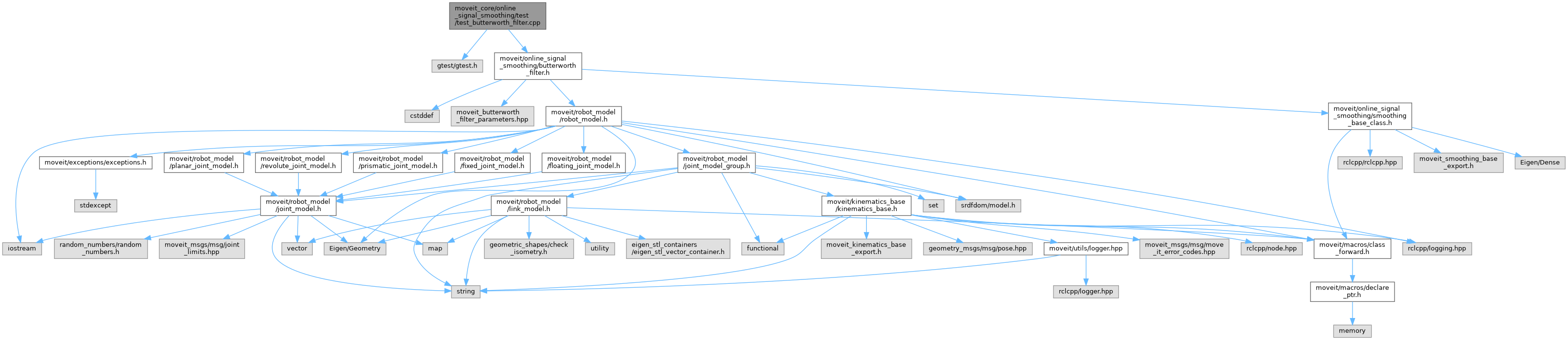
Include dependency graph for test_butterworth_filter.cpp:
Go to the source code of this file.
Functions | |
| TEST (SMOOTHING_PLUGINS, FilterConverge) | |
| TEST (SMOOTHING_PLUGINS, FilterReset) | |
Function Documentation
◆ TEST() [1/2]
| TEST | ( | SMOOTHING_PLUGINS | , |
| FilterConverge | |||
| ) |
Definition at line 45 of file test_butterworth_filter.cpp.
Here is the call graph for this function:

◆ TEST() [2/2]
| TEST | ( | SMOOTHING_PLUGINS | , |
| FilterReset | |||
| ) |
Definition at line 61 of file test_butterworth_filter.cpp.
Here is the call graph for this function:
