How to benchmark your planning pipeline
Getting Started
If you haven’t already done so, make sure you’ve completed the steps in Getting Started.
The benchmarking package provides methods to benchmark a MoveIt planning pipeline and aggregate/plot statistics using the OMPL Planner Arena. The example below demonstrates how the benchmarking can be run.
Example
To run the example you need to install git lfs by running git lfs install and clone `moveit_benchmark_resources <https://github.com/moveit/moveit_benchmark_resources.git`_ into your workspace.
Start the benchmarks by running:
ros2 launch moveit2_tutorials run_benchmarks.launch.py
This will take a while depending on the settings in benchmarks.yaml. The benchmark results will be saved in /tmp/moveit_benchmarks/.
To introspect the benchmark data, the log files need to be converted into a database. This can be done using a script provided in the moveit_ros_benchmarks package:
ros2 run moveit_ros_benchmarks moveit_benchmark_statistics.py LOG_FILE_1 ... LOG_FILE_N
This command will create a database containing the data form all benchmark log files included. An easier way to create the database is to create it with all log files from a given repository.
For example, the argument /tmp/moveit_benchmarks/* can be used to collect all log files in the given directory into a single database. This database is created in the location where the command
above is run in a file names benchmark.db.
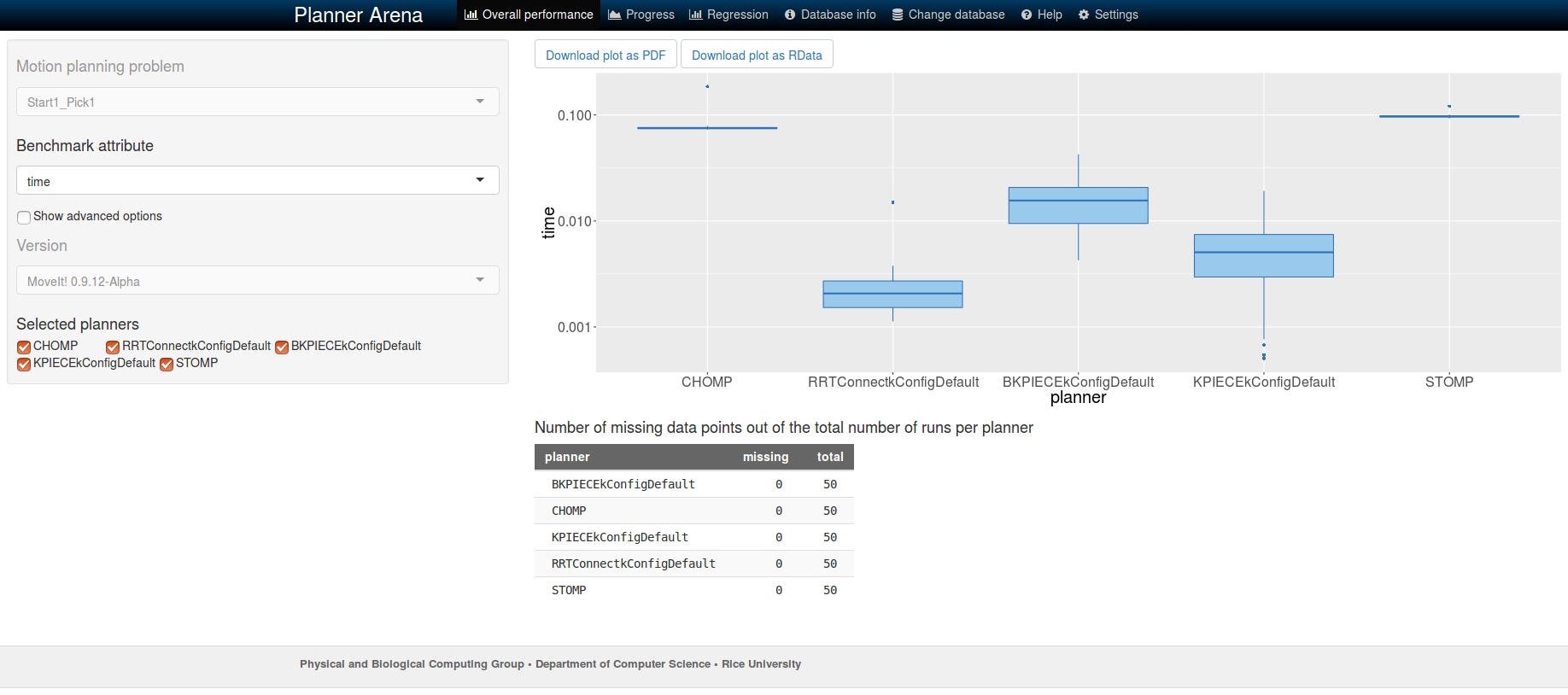
The database can be visualized by uploading the the file to plannerarena.org and interactively visualizing the results.
ROS 2 parameters to configure a benchmark
The benchmarks are configured by a set of ROS 2 parameters. You can learn more about these parameters in the BenchmarkOptions.hpp file.
The BenchmarkExecutor Class
This class creates a set of MotionPlanRequests that respect the parameters given in the supplied instance of BenchmarkOptions and then executes the requests on each of the planners specified. From the BenchmarkOptions, queries, goal_constraints, and trajectory_constraints are treated as separate queries. If a set of start_states is specified, each query, goal_constraint, and trajectory_constraint is attempted with each start state (existing start states from a query are ignored). Similarly, the (optional) set of path constraints is combined combinatorially with the start query and start goal_constraint pairs (existing path_constraint from a query are ignored). The workspace, if specified, overrides any existing workspace parameters.
The benchmarking pipeline does not utilize MoveGroup.
Instead, the planning pipelines are initialized and run directly including all specified PlanningRequestAdapters.
This is especially useful for benchmarking the effects of smoothing adapters.
It is possible to customize a benchmark run by deriving a class from BenchmarkExecutor and overriding one or more of the virtual functions.
For instance, overriding the functions initializeBenchmarks() or loadBenchmarkQueryData() allows to specify the benchmark queries directly and to provide a custom planning scene without using ROS warehouse.
Additionally, a set of functions exists for ease of customization in derived classes:
preRunEvent: invoked immediately before each call to solvepostRunEvent: invoked immediately after each call to solveplannerSwitchEvent: invoked when the planner changes during benchmarkingquerySwitchEvent: invoked before a new benchmark problem begin execution
Note, in the above, a benchmark is a concrete instance of a PlanningScene, start state, goal constraints / trajectory_constraints, and (optionally) path_constraints. A run is one attempt by a specific planner to solve the benchmark.