How to Teleoperate a Robotic Arm with a Gamepad
This guide will introduce you to using a gamepad to move the panda arm.
Prerequisites
Make sure your workspace has the required packages installed and that you
have a gamepad supported by ROS2 joy. This can be tested by launching a
joy node and then running ros2 topic echo /joy to ensure your
gamepad is detected by joy.
Requirements
Ubuntu 22.04
ROS 2 Humble
MoveIt 2
MoveIt 2 Tutorials
Steps
Build the MoveIt 2 workspace
First,
cdto the root directory of the moveit2 workspace. (if you followed the Getting Started tutorial, this will be~/ws_moveit/).Then, run
colcon build.
Plug in your gamepad.
Source the install script and run the
moveit_servoexample file.
Run
source install/setup.bash, thenros2 launch moveit_servo servo_example.launch.py
Move the arm around, using the below image as a guide.
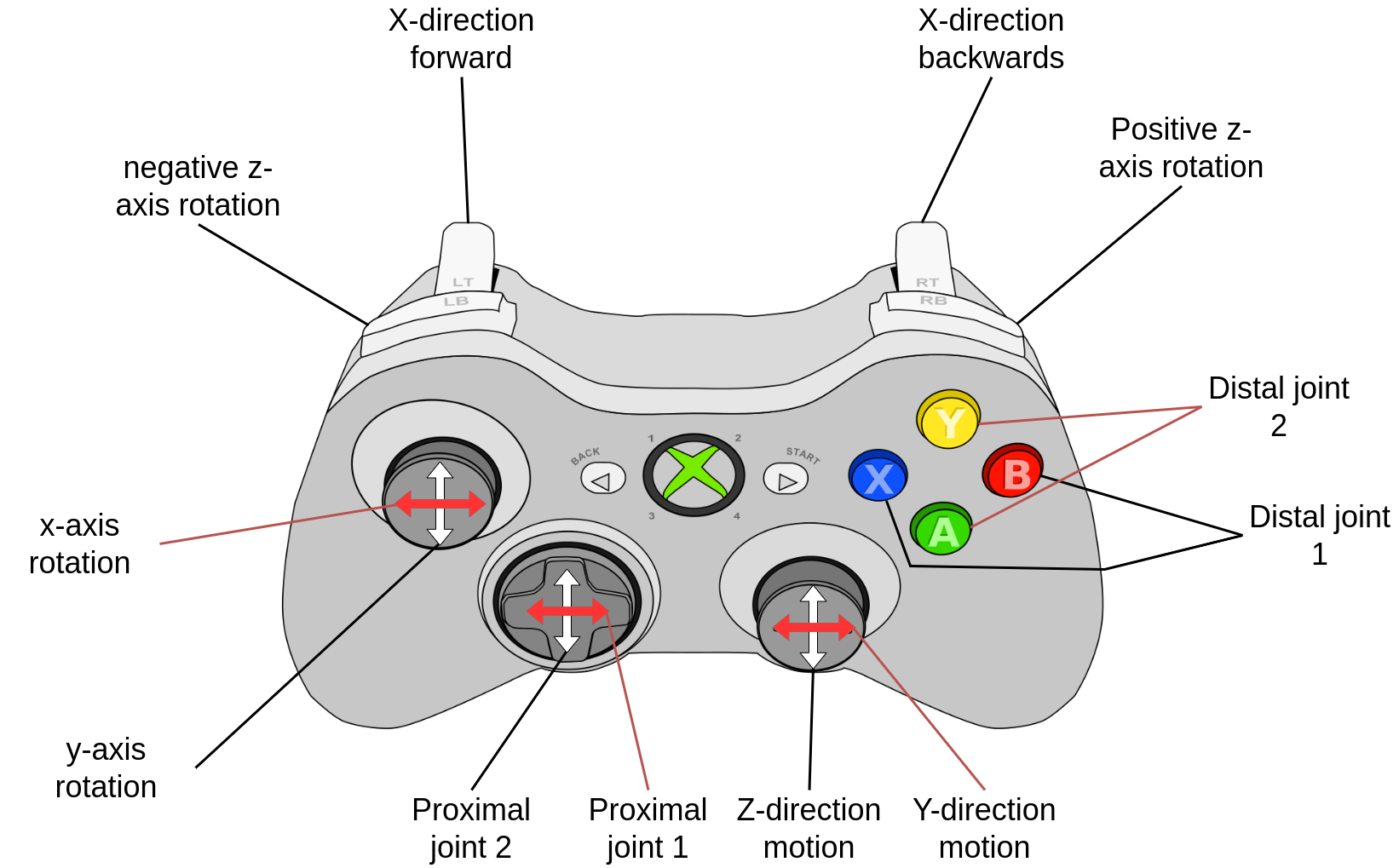
The drawio document can be seen here.
Explanation
This section explains the launch file and the node that translates gamepad inputs to motion commands.
Launch File
The file that launches this example is
ws_moveit2/src/moveit2/moveit_ros/moveit_servo/launch/servo_example.launch.py
This launch file launches everything needed for the panda arm planning, and also launches the joy node and the JoyToServoPub node (which is explained below).
Of primary interest is the section of code that launches the joy and JoyToServoPub nodes.
They are both created as ComposableNodes. More information about ComposableNodes can be found here and here.
ComposableNode(
package="moveit_servo",
plugin="moveit_servo::JoyToServoPub",
name="controller_to_servo_node",
),
ComposableNode(
package="joy",
plugin="joy::Joy",
name="joy_node",
)
JoyToServoPub
The node that translates gamepad inputs to motion commands is
ws_moveit2/src/moveit2/moveit_ros/moveit_servo/src/teleop_demo/joystick_servo_example.cpp
This node subscribes to the joy node (which publishes messages giving the state of the gamepad). It publishes TwistStamped messages, JointJog messages, and PlanningScene messages.
The PlanningScene message is only published once, when the JoyToServoPub is first constructed. It simply adds some obstacles into the planning scene.
The difference between the JointJog and TwistStamped messages is
that the inverse kinematic solver moves the joints to achieve the end
effector motions defined by the TwistStamped messages, while the
JointJog messages directly move individual joints.
The joyCB function is called when a message is published to the joy
topic, and translates the button presses from the gamepad into commands
for the arm. If both JointJog and TwistStamped messages would be
published by the inputs, only JointJog messages are published.