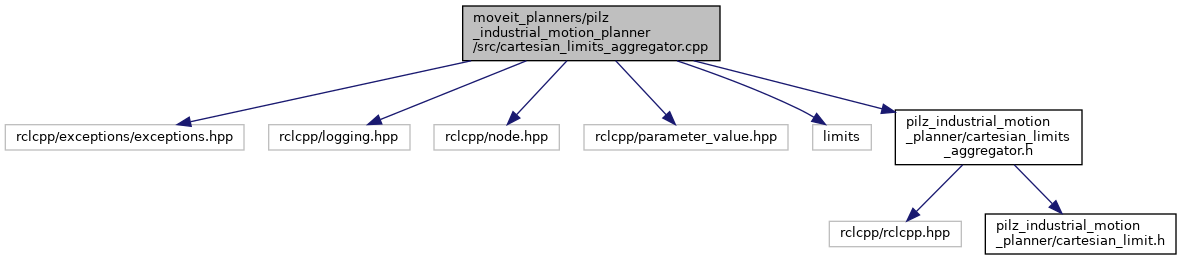
#include <rclcpp/exceptions/exceptions.hpp>#include <rclcpp/logging.hpp>#include <rclcpp/node.hpp>#include <rclcpp/parameter_value.hpp>#include <limits>#include <pilz_industrial_motion_planner/cartesian_limits_aggregator.h>
Include dependency graph for cartesian_limits_aggregator.cpp:
Go to the source code of this file.
Functions | |
| bool | declareAndGetParam (double &output_value, const std::string ¶m_name, const rclcpp::Node::SharedPtr &node) |
Function Documentation
◆ declareAndGetParam()
| bool declareAndGetParam | ( | double & | output_value, |
| const std::string & | param_name, | ||
| const rclcpp::Node::SharedPtr & | node | ||
| ) |
Definition at line 53 of file cartesian_limits_aggregator.cpp.