|
| | MOCK_METHOD0 (active_callback, void()) |
| |
| | MOCK_METHOD1 (feedback_callback, void(const moveit_msgs::msg::MoveGroupSequenceFeedbackConstPtr &feedback)) |
| |
| | MOCK_METHOD2 (done_callback, void(const actionlib::SimpleClientGoalState &state, const moveit_msgs::msg::MoveGroupSequenceResultConstPtr &result)) |
| |
| | MOCK_METHOD0 (active_callback, void()) |
| |
| | MOCK_METHOD1 (feedback_callback, void(const moveit_msgs::msg::MoveGroupSequenceFeedbackConstPtr &feedback)) |
| |
| | MOCK_METHOD2 (done_callback, void(const actionlib::SimpleClientGoalState &state, const moveit_msgs::msg::MoveGroupSequenceResultConstPtr &result)) |
| |
| void | triggerClearEvent (const std::string &event) |
| | Triggers a clear event. If a call to barricade is currently pending it will unblock as soon as all clear events are triggered. Else the event is put on the waitlist. This waitlist is emptied upon a call to barricade. More...
|
| |
| bool | barricade (const std::string &clear_event, const int timeout_ms=-1) |
| | Will block until the event given by clear_event is triggered or a timeout is reached. Unblocks immediately, if the event was on the waitlist. More...
|
| |
| bool | barricade (std::initializer_list< std::string > clear_events, const int timeout_ms=-1) |
| | Will block until all events given by clear_events are triggered or a timeout is reached. Events on the waitlist are taken into account, too. More...
|
| |
◆ MOCK_METHOD0() [1/2]
| IntegrationTestSequenceAction::MOCK_METHOD0 |
( |
active_callback |
, |
|
|
void() |
|
|
) |
| |
◆ MOCK_METHOD0() [2/2]
| IntegrationTestSequenceAction::MOCK_METHOD0 |
( |
active_callback |
, |
|
|
void() |
|
|
) |
| |
◆ MOCK_METHOD1() [1/2]
| IntegrationTestSequenceAction::MOCK_METHOD1 |
( |
feedback_callback |
, |
|
|
void(const moveit_msgs::msg::MoveGroupSequenceFeedbackConstPtr &feedback) |
|
|
) |
| |
◆ MOCK_METHOD1() [2/2]
| IntegrationTestSequenceAction::MOCK_METHOD1 |
( |
feedback_callback |
, |
|
|
void(const moveit_msgs::msg::MoveGroupSequenceFeedbackConstPtr &feedback) |
|
|
) |
| |
◆ MOCK_METHOD2() [1/2]
| IntegrationTestSequenceAction::MOCK_METHOD2 |
( |
done_callback |
, |
|
|
void(const actionlib::SimpleClientGoalState &state, const moveit_msgs::msg::MoveGroupSequenceResultConstPtr &result) |
|
|
) |
| |
◆ MOCK_METHOD2() [2/2]
| IntegrationTestSequenceAction::MOCK_METHOD2 |
( |
done_callback |
, |
|
|
void(const actionlib::SimpleClientGoalState &state, const moveit_msgs::msg::MoveGroupSequenceResultConstPtr &result) |
|
|
) |
| |
◆ SetUp() [1/2]
| void IntegrationTestSequenceAction::SetUp |
( |
| ) |
|
|
overrideprotected |
◆ SetUp() [2/2]
| void IntegrationTestSequenceAction::SetUp |
( |
| ) |
|
|
overrideprotected |
◆ ac_
| actionlib::SimpleActionClient< moveit_msgs::msg::MoveGroupSequenceAction > IntegrationTestSequenceAction::ac_ { ph_, SEQUENCE_ACTION_NAME, true } |
|
protected |
◆ data_loader_
◆ group_name_
| std::string IntegrationTestSequenceAction::group_name_ |
|
protected |
◆ joint_position_tolerance_
| double IntegrationTestSequenceAction::joint_position_tolerance_ |
|
protected |
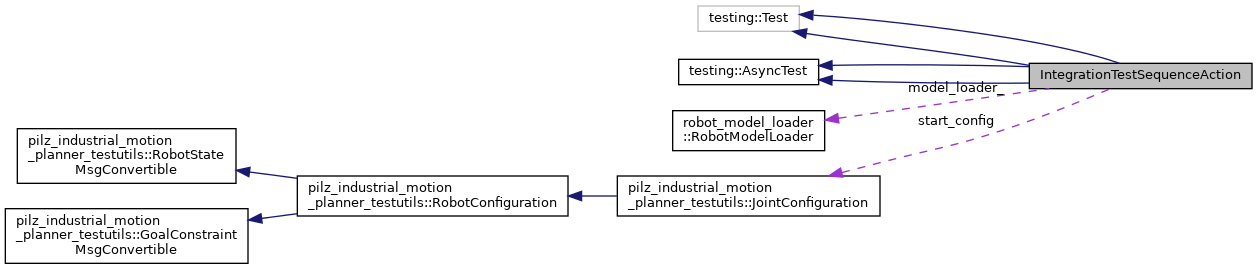
◆ model_loader_
◆ move_group_
◆ ph_
| ros::NodeHandle IntegrationTestSequenceAction::ph_ { "~" } |
|
protected |
◆ robot_model_
| robot_model::RobotModelPtr IntegrationTestSequenceAction::robot_model_ |
|
protected |
◆ start_config
◆ test_data_file_name_
| std::string IntegrationTestSequenceAction::test_data_file_name_ |
|
protected |
The documentation for this class was generated from the following files:
 Public Member Functions inherited from testing::AsyncTest
Public Member Functions inherited from testing::AsyncTest