Inheritance diagram for PlanningContextTest< T >:
Collaboration diagram for PlanningContextTest< T >:
Protected Member Functions | |
| void | SetUp () override |
| void | TearDown () override |
| planning_interface::MotionPlanRequest | getValidRequest (const std::string &context_name) const |
| Generate a valid fully defined request. More... | |
Protected Attributes | |
| rclcpp::Node::SharedPtr | node_ |
| moveit::core::RobotModelConstPtr | robot_model_ |
| std::unique_ptr< robot_model_loader::RobotModelLoader > | rm_loader_ |
| std::unique_ptr< planning_interface::PlanningContext > | planning_context_ |
| std::string | planning_group_ |
| std::string | target_link_ |
Detailed Description
template<typename T>
class PlanningContextTest< T >
type parameterized test fixture
Definition at line 87 of file unittest_planning_context.cpp.
Member Function Documentation
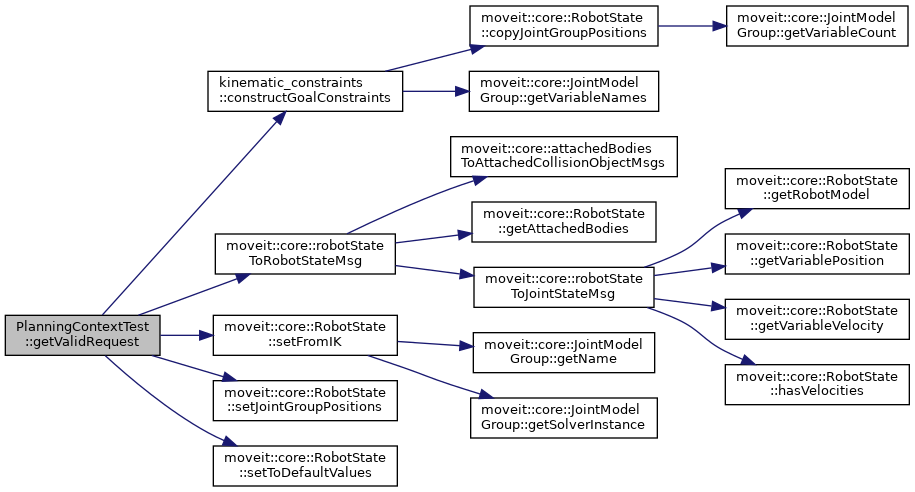
◆ getValidRequest()
template<typename T >
|
inlineprotected |
Generate a valid fully defined request.
Definition at line 140 of file unittest_planning_context.cpp.
Here is the call graph for this function:
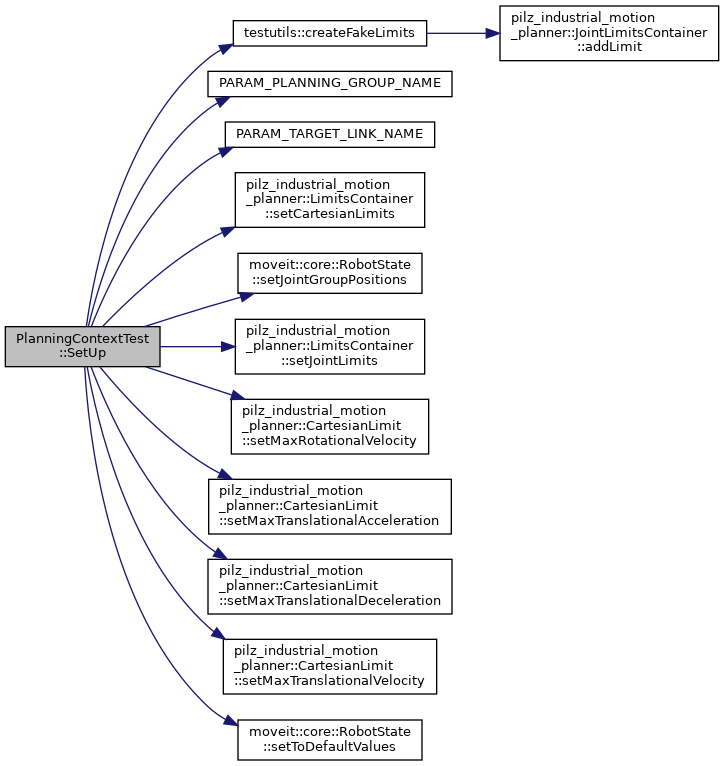
◆ SetUp()
template<typename T >
|
inlineoverrideprotected |
Definition at line 90 of file unittest_planning_context.cpp.
Here is the call graph for this function:
◆ TearDown()
template<typename T >
|
inlineoverrideprotected |
Definition at line 132 of file unittest_planning_context.cpp.
Member Data Documentation
◆ node_
template<typename T >
|
protected |
Definition at line 190 of file unittest_planning_context.cpp.
◆ planning_context_
template<typename T >
|
protected |
Definition at line 194 of file unittest_planning_context.cpp.
◆ planning_group_
template<typename T >
|
protected |
Definition at line 196 of file unittest_planning_context.cpp.
◆ rm_loader_
template<typename T >
|
protected |
Definition at line 192 of file unittest_planning_context.cpp.
◆ robot_model_
template<typename T >
|
protected |
Definition at line 191 of file unittest_planning_context.cpp.
◆ target_link_
template<typename T >
|
protected |
Definition at line 196 of file unittest_planning_context.cpp.
The documentation for this class was generated from the following file:
- moveit_planners/pilz_industrial_motion_planner/test/unit_tests/src/unittest_planning_context.cpp