Public Member Functions | |
| OptimizerAdapter () | |
| void | initialize (const rclcpp::Node::SharedPtr &node, const std::string &) override |
| Initialize parameters using the passed Node and parameter namespace. If no initialization is needed, simply implement as empty. More... | |
| std::string | getDescription () const override |
| Get a short string that identifies the planning request adapter. More... | |
| bool | adaptAndPlan (const PlannerFn &planner, const planning_scene::PlanningSceneConstPtr &ps, const planning_interface::MotionPlanRequest &req, planning_interface::MotionPlanResponse &res, std::vector< std::size_t > &) const override |
| Adapt the planning request if needed, call the planner function planner and update the planning response if needed. If the response is changed, the index values of the states added without planning are added to added_path_index. More... | |
 Public Member Functions inherited from planning_request_adapter::PlanningRequestAdapter Public Member Functions inherited from planning_request_adapter::PlanningRequestAdapter | |
| PlanningRequestAdapter () | |
| virtual | ~PlanningRequestAdapter () |
| bool | adaptAndPlan (const planning_interface::PlannerManagerPtr &planner, const planning_scene::PlanningSceneConstPtr &planning_scene, const planning_interface::MotionPlanRequest &req, planning_interface::MotionPlanResponse &res) const |
| bool | adaptAndPlan (const planning_interface::PlannerManagerPtr &planner, const planning_scene::PlanningSceneConstPtr &planning_scene, const planning_interface::MotionPlanRequest &req, planning_interface::MotionPlanResponse &res, std::vector< std::size_t > &added_path_index) const |
Additional Inherited Members | |
| Public Types inherited from planning_request_adapter::PlanningRequestAdapter | |
| using | PlannerFn = std::function< bool(const planning_scene::PlanningSceneConstPtr &, const planning_interface::MotionPlanRequest &, planning_interface::MotionPlanResponse &)> |
| Protected Member Functions inherited from planning_request_adapter::PlanningRequestAdapter | |
| template<typename T > | |
| T | getParam (const rclcpp::Node::SharedPtr &node, const rclcpp::Logger &logger, const std::string ¶meter_namespace, const std::string ¶meter_name, T default_value={}) const |
| Helper param for getting a parameter using a namespace. More... | |
Detailed Description
Definition at line 58 of file chomp_optimizer_adapter.cpp.
Constructor & Destructor Documentation
◆ OptimizerAdapter()
|
inline |
Definition at line 61 of file chomp_optimizer_adapter.cpp.
Member Function Documentation
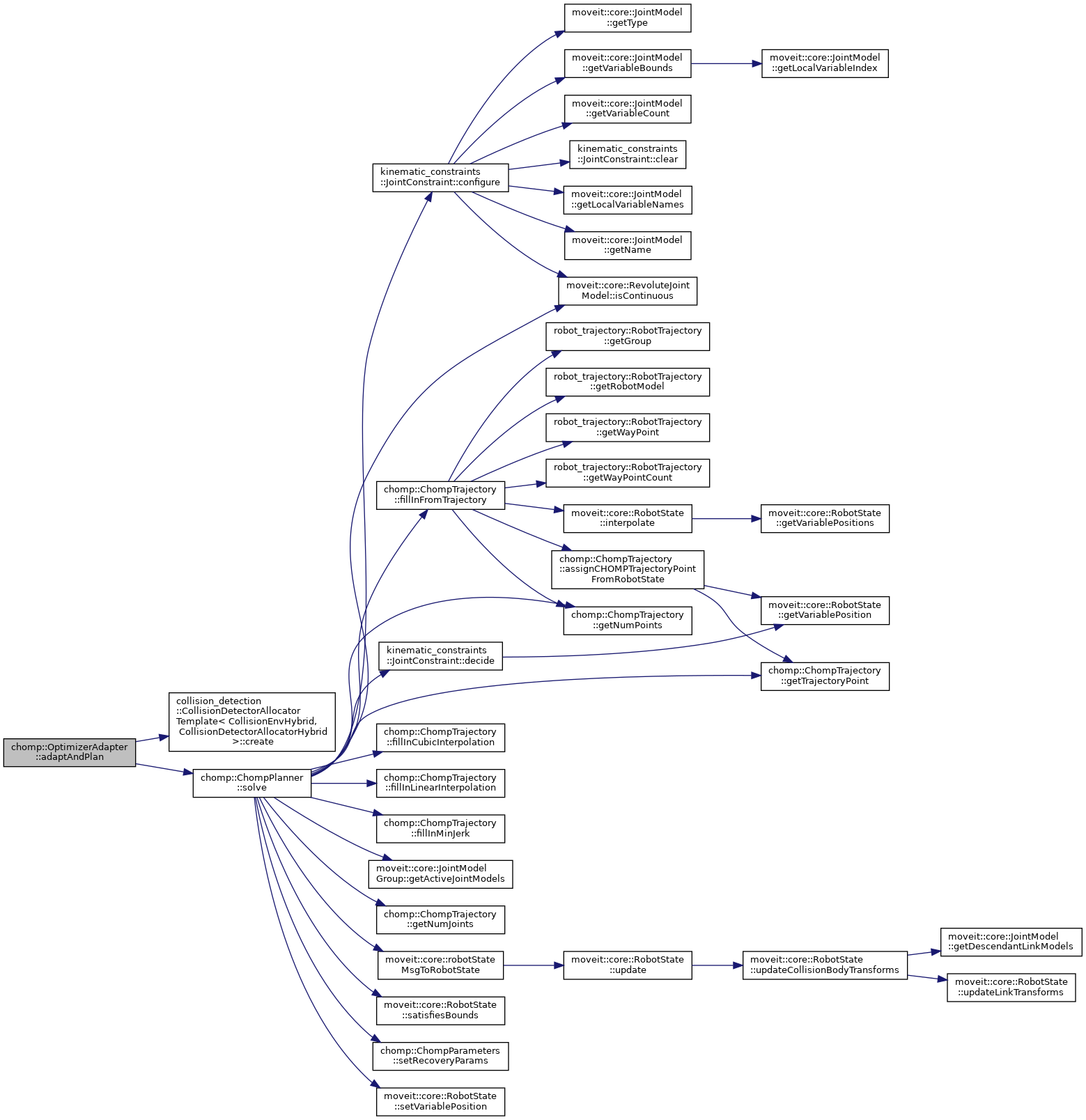
◆ adaptAndPlan()
|
inlineoverridevirtual |
Adapt the planning request if needed, call the planner function planner and update the planning response if needed. If the response is changed, the index values of the states added without planning are added to added_path_index.
Implements planning_request_adapter::PlanningRequestAdapter.
Definition at line 175 of file chomp_optimizer_adapter.cpp.
◆ getDescription()
|
inlineoverridevirtual |
Get a short string that identifies the planning request adapter.
Reimplemented from planning_request_adapter::PlanningRequestAdapter.
Definition at line 170 of file chomp_optimizer_adapter.cpp.
◆ initialize()
|
inlineoverridevirtual |
Initialize parameters using the passed Node and parameter namespace. If no initialization is needed, simply implement as empty.
Implements planning_request_adapter::PlanningRequestAdapter.
Definition at line 65 of file chomp_optimizer_adapter.cpp.

The documentation for this class was generated from the following file:
- moveit_planners/chomp/chomp_optimizer_adapter/src/chomp_optimizer_adapter.cpp