Definition of a structure for the allowed collision matrix. All elements in the collision world are referred to by their names. This class represents which collisions are allowed to happen and which are not. More...
#include <collision_matrix.h>
Public Member Functions | |
| AllowedCollisionMatrix () | |
| AllowedCollisionMatrix (const std::vector< std::string > &names, bool allowed=false) | |
| Instantiate using a vector of names (corresponding to all the elements in the collision world). More... | |
| AllowedCollisionMatrix (const srdf::Model &srdf) | |
| Construct from an SRDF representation. More... | |
| AllowedCollisionMatrix (const moveit_msgs::msg::AllowedCollisionMatrix &msg) | |
| Construct the structure from a message representation. More... | |
| AllowedCollisionMatrix (const AllowedCollisionMatrix &acm)=default | |
| Copy constructor. More... | |
| AllowedCollisionMatrix & | operator= (const AllowedCollisionMatrix &)=default |
| Copy assignment. More... | |
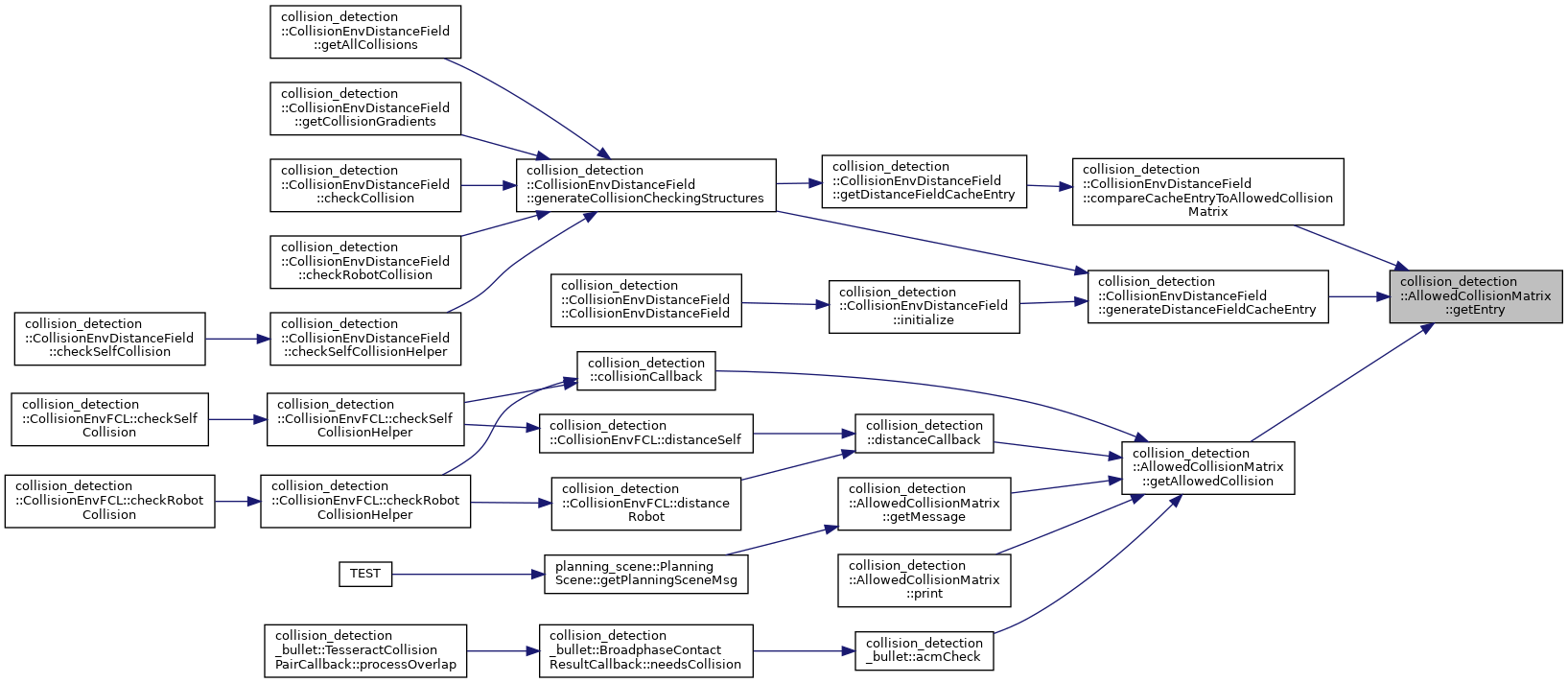
| bool | getEntry (const std::string &name1, const std::string &name2, AllowedCollision::Type &allowed_collision_type) const |
| Get the type of the allowed collision between two elements. Return true if the entry is included in the collision matrix. Return false if the entry is not found. More... | |
| bool | getEntry (const std::string &name1, const std::string &name2, DecideContactFn &fn) const |
| Get the allowed collision predicate between two elements. Return true if a predicate for this entry is available in the collision matrix. Return false if the entry is not found. More... | |
| bool | hasEntry (const std::string &name) const |
| Check if the allowed collision matrix has an entry at all for an element. Returns true if the element is included. More... | |
| bool | hasEntry (const std::string &name1, const std::string &name2) const |
| Check if the allowed collision matrix has an entry for a pair of elements. Returns true if the pair is included. More... | |
| void | removeEntry (const std::string &name1, const std::string &name2) |
| Remove an entry corresponding to a pair of elements. Nothing happens if the pair does not exist in the collision matrix. More... | |
| void | removeEntry (const std::string &name) |
| Remove all entries corresponding to a name (all pairs that include this name) More... | |
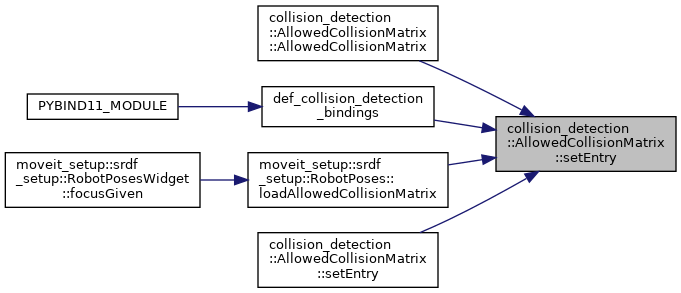
| void | setEntry (const std::string &name1, const std::string &name2, bool allowed) |
| Set an entry corresponding to a pair of elements. More... | |
| void | setEntry (const std::string &name1, const std::string &name2, DecideContactFn &fn) |
| Set an entry corresponding to a pair of elements. More... | |
| void | setEntry (const std::string &name, bool allowed) |
| Set the entries corresponding to a name. With each of the known names in the collision matrix, form a pair using the name specified as argument to this function and set the entry as indicated by allowed. As the set of known names might change in future, consider using setDefaultEntry() instead! More... | |
| void | setEntry (const std::string &name, const std::vector< std::string > &other_names, bool allowed) |
| Set multiple entries. Pairs of names are formed using name and other_names. More... | |
| void | setEntry (const std::vector< std::string > &names1, const std::vector< std::string > &names2, bool allowed) |
| Set an entry corresponding to all possible pairs between two sets of elements. More... | |
| void | setEntry (bool allowed) |
| Set an entry corresponding to all known pairs. More... | |
| void | getAllEntryNames (std::vector< std::string > &names) const |
| Get all the names known to the collision matrix. More... | |
| void | getMessage (moveit_msgs::msg::AllowedCollisionMatrix &msg) const |
| Get the allowed collision matrix as a message. More... | |
| void | clear () |
| Clear the allowed collision matrix. More... | |
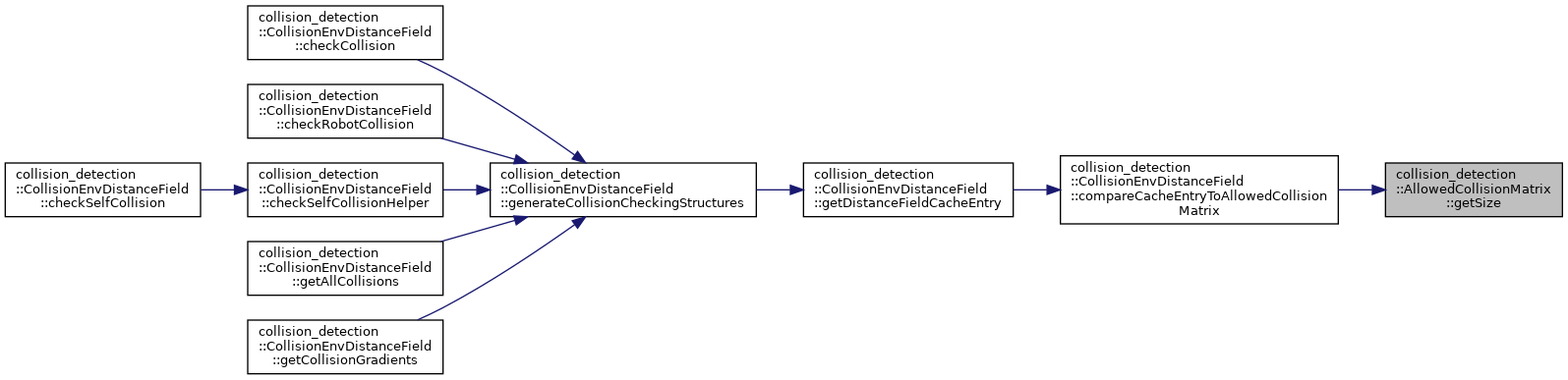
| std::size_t | getSize () const |
| Get the size of the allowed collision matrix (number of specified entries) More... | |
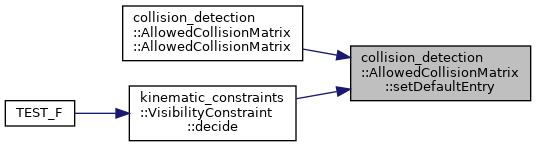
| void | setDefaultEntry (const std::string &name, bool allowed) |
| Set the default value for entries that include name but are not set explicitly with setEntry(). More... | |
| void | setDefaultEntry (const std::string &name, DecideContactFn &fn) |
| Set the default value for entries that include name but are not set explicitly with setEntry(). More... | |
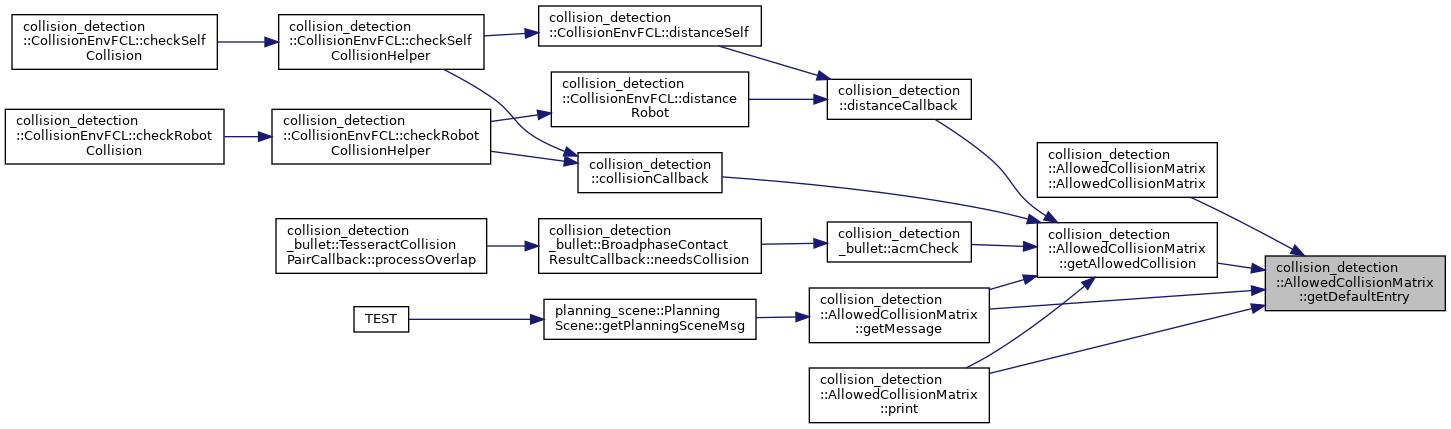
| bool | getDefaultEntry (const std::string &name, AllowedCollision::Type &allowed_collision) const |
| Get the type of the allowed collision to be considered by default for an element. Return true if a default value was found for the specified element. Return false otherwise. More... | |
| bool | getDefaultEntry (const std::string &name, DecideContactFn &fn) const |
| Get the type of the allowed collision between to be considered by default for an element. Return true if a default value was found for the specified element. Return false otherwise. More... | |
| bool | getAllowedCollision (const std::string &name1, const std::string &name2, DecideContactFn &fn) const |
| Get the allowed collision predicate between two elements. Return true if a predicate for entry is included in the collision matrix (if the type is AllowedCollision::CONDITIONAL) or if one was computed from defaults. Return false if the entry is not found. More... | |
| bool | getAllowedCollision (const std::string &name1, const std::string &name2, AllowedCollision::Type &allowed_collision) const |
| Get the type of the allowed collision between two elements. Return true if the entry is included in the collision matrix or if specified defaults were found. Return false if the entry is not found. More... | |
| void | print (std::ostream &out) const |
| Print the allowed collision matrix. More... | |
Detailed Description
Definition of a structure for the allowed collision matrix. All elements in the collision world are referred to by their names. This class represents which collisions are allowed to happen and which are not.
Definition at line 79 of file collision_matrix.h.
Constructor & Destructor Documentation
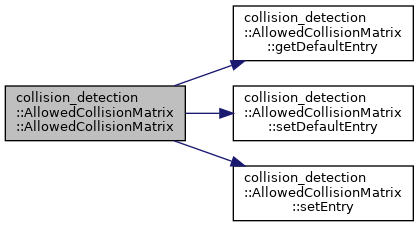
◆ AllowedCollisionMatrix() [1/5]
| collision_detection::AllowedCollisionMatrix::AllowedCollisionMatrix | ( | ) |
Definition at line 48 of file collision_matrix.cpp.
◆ AllowedCollisionMatrix() [2/5]
| collision_detection::AllowedCollisionMatrix::AllowedCollisionMatrix | ( | const std::vector< std::string > & | names, |
| bool | allowed = false |
||
| ) |
Instantiate using a vector of names (corresponding to all the elements in the collision world).
- Parameters
-
names a vector of names (corresponding to object IDs in the collision world). allowed If false, indicates that collisions between all elements must be checked for and no collisions will be ignored.
Definition at line 52 of file collision_matrix.cpp.

◆ AllowedCollisionMatrix() [3/5]
| collision_detection::AllowedCollisionMatrix::AllowedCollisionMatrix | ( | const srdf::Model & | srdf | ) |
Construct from an SRDF representation.
Definition at line 59 of file collision_matrix.cpp.

◆ AllowedCollisionMatrix() [4/5]
| collision_detection::AllowedCollisionMatrix::AllowedCollisionMatrix | ( | const moveit_msgs::msg::AllowedCollisionMatrix & | msg | ) |
Construct the structure from a message representation.
Definition at line 72 of file collision_matrix.cpp.
◆ AllowedCollisionMatrix() [5/5]
|
default |
Copy constructor.
Member Function Documentation
◆ clear()
| void collision_detection::AllowedCollisionMatrix::clear | ( | ) |
Clear the allowed collision matrix.
Definition at line 337 of file collision_matrix.cpp.

◆ getAllEntryNames()
| void collision_detection::AllowedCollisionMatrix::getAllEntryNames | ( | std::vector< std::string > & | names | ) | const |
Get all the names known to the collision matrix.
Definition at line 345 of file collision_matrix.cpp.

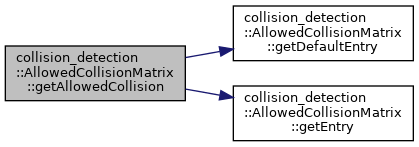
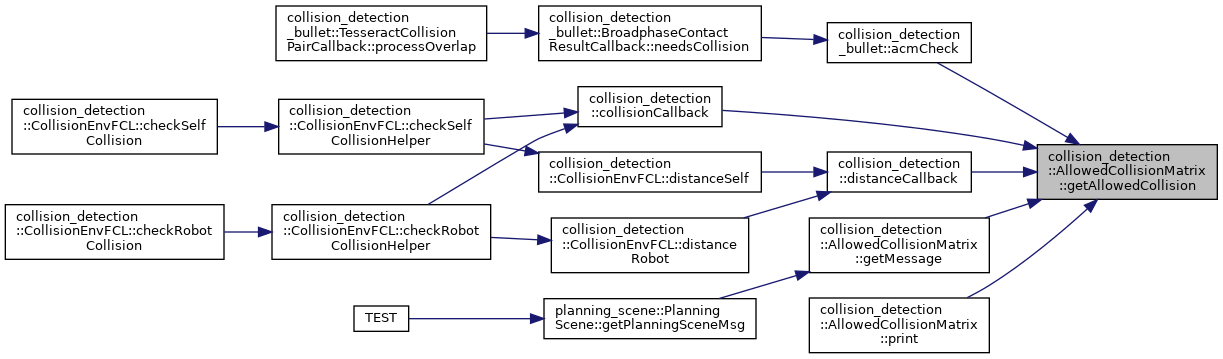
◆ getAllowedCollision() [1/2]
| bool collision_detection::AllowedCollisionMatrix::getAllowedCollision | ( | const std::string & | name1, |
| const std::string & | name2, | ||
| AllowedCollision::Type & | allowed_collision | ||
| ) | const |
Get the type of the allowed collision between two elements. Return true if the entry is included in the collision matrix or if specified defaults were found. Return false if the entry is not found.
- Parameters
-
name1 name of first element name2 name of second element allowed_collision The allowed collision type will be filled here
Definition at line 331 of file collision_matrix.cpp.
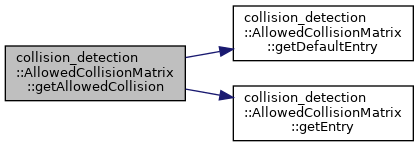
◆ getAllowedCollision() [2/2]
| bool collision_detection::AllowedCollisionMatrix::getAllowedCollision | ( | const std::string & | name1, |
| const std::string & | name2, | ||
| DecideContactFn & | fn | ||
| ) | const |
Get the allowed collision predicate between two elements. Return true if a predicate for entry is included in the collision matrix (if the type is AllowedCollision::CONDITIONAL) or if one was computed from defaults. Return false if the entry is not found.
- Parameters
-
name1 name of first element name2 name of second element fn Return the callback function that is used to decide if collisions are allowed between the two elements.
Definition at line 286 of file collision_matrix.cpp.
◆ getDefaultEntry() [1/2]
| bool collision_detection::AllowedCollisionMatrix::getDefaultEntry | ( | const std::string & | name, |
| AllowedCollision::Type & | allowed_collision | ||
| ) | const |
Get the type of the allowed collision to be considered by default for an element. Return true if a default value was found for the specified element. Return false otherwise.
- Parameters
-
name name of the element allowed_collision The default allowed collision type will be filled here
Definition at line 263 of file collision_matrix.cpp.
◆ getDefaultEntry() [2/2]
| bool collision_detection::AllowedCollisionMatrix::getDefaultEntry | ( | const std::string & | name, |
| DecideContactFn & | fn | ||
| ) | const |
Get the type of the allowed collision between to be considered by default for an element. Return true if a default value was found for the specified element. Return false otherwise.
- Parameters
-
name name of the element fn Return the callback function that is used to decide if collisions are allowed between the two elements.
Definition at line 272 of file collision_matrix.cpp.
◆ getEntry() [1/2]
| bool collision_detection::AllowedCollisionMatrix::getEntry | ( | const std::string & | name1, |
| const std::string & | name2, | ||
| AllowedCollision::Type & | allowed_collision_type | ||
| ) | const |
Get the type of the allowed collision between two elements. Return true if the entry is included in the collision matrix. Return false if the entry is not found.
- Parameters
-
name1 name of first element name2 name of second element allowed_collision_type The allowed collision type will be filled here
Definition at line 118 of file collision_matrix.cpp.
◆ getEntry() [2/2]
| bool collision_detection::AllowedCollisionMatrix::getEntry | ( | const std::string & | name1, |
| const std::string & | name2, | ||
| DecideContactFn & | fn | ||
| ) | const |
Get the allowed collision predicate between two elements. Return true if a predicate for this entry is available in the collision matrix. Return false if the entry is not found.
- Parameters
-
name1 name of first element name2 name of second element fn A callback function that is used to decide if collisions are allowed between the two elements is filled here
Definition at line 106 of file collision_matrix.cpp.
◆ getMessage()
| void collision_detection::AllowedCollisionMatrix::getMessage | ( | moveit_msgs::msg::AllowedCollisionMatrix & | msg | ) | const |
Get the allowed collision matrix as a message.
Definition at line 359 of file collision_matrix.cpp.


◆ getSize()
|
inline |
Get the size of the allowed collision matrix (number of specified entries)
Definition at line 199 of file collision_matrix.h.
◆ hasEntry() [1/2]
| bool collision_detection::AllowedCollisionMatrix::hasEntry | ( | const std::string & | name | ) | const |
Check if the allowed collision matrix has an entry at all for an element. Returns true if the element is included.
- Parameters
-
name name of the element
Definition at line 131 of file collision_matrix.cpp.
◆ hasEntry() [2/2]
| bool collision_detection::AllowedCollisionMatrix::hasEntry | ( | const std::string & | name1, |
| const std::string & | name2 | ||
| ) | const |
Check if the allowed collision matrix has an entry for a pair of elements. Returns true if the pair is included.
- Parameters
-
name1 name of first element name2 name of second element
Definition at line 136 of file collision_matrix.cpp.
◆ operator=()
|
default |
Copy assignment.
◆ print()
| void collision_detection::AllowedCollisionMatrix::print | ( | std::ostream & | out | ) | const |
Print the allowed collision matrix.
Definition at line 393 of file collision_matrix.cpp.

◆ removeEntry() [1/2]
| void collision_detection::AllowedCollisionMatrix::removeEntry | ( | const std::string & | name | ) |
Remove all entries corresponding to a name (all pairs that include this name)
- Parameters
-
name namespace
Definition at line 173 of file collision_matrix.cpp.
◆ removeEntry() [2/2]
| void collision_detection::AllowedCollisionMatrix::removeEntry | ( | const std::string & | name1, |
| const std::string & | name2 | ||
| ) |
Remove an entry corresponding to a pair of elements. Nothing happens if the pair does not exist in the collision matrix.
- Parameters
-
name1 name of first element name2 name of second element
Definition at line 183 of file collision_matrix.cpp.

◆ setDefaultEntry() [1/2]
| void collision_detection::AllowedCollisionMatrix::setDefaultEntry | ( | const std::string & | name, |
| bool | allowed | ||
| ) |
Set the default value for entries that include name but are not set explicitly with setEntry().
- Parameters
-
name The name of the element for which to set the default value allowed If false, indicates that collisions between name and any other element must be checked for and no collisions will be ignored (AllowedCollision::NEVER). If true, indicates that collisions between name and any other element are ok and an explicit collision computation is not necessary (AllowedCollision::ALWAYS).
Definition at line 250 of file collision_matrix.cpp.
◆ setDefaultEntry() [2/2]
| void collision_detection::AllowedCollisionMatrix::setDefaultEntry | ( | const std::string & | name, |
| DecideContactFn & | fn | ||
| ) |
Set the default value for entries that include name but are not set explicitly with setEntry().
- Parameters
-
name The name of the element for which to set the default value fn A callback function that is used to decide if collisions are allowed between name and some other element is expected here.
Definition at line 257 of file collision_matrix.cpp.
◆ setEntry() [1/6]
| void collision_detection::AllowedCollisionMatrix::setEntry | ( | bool | allowed | ) |
Set an entry corresponding to all known pairs.
- Parameters
-
allowed If false, indicates that collisions between two elements must be checked for and no collisions will be ignored (AllowedCollision::NEVER). If true, indicates that collisions between two elements are ok and an explicit collision computation is not necessary (AllowedCollision::ALWAYS).
Definition at line 242 of file collision_matrix.cpp.
◆ setEntry() [2/6]
| void collision_detection::AllowedCollisionMatrix::setEntry | ( | const std::string & | name, |
| bool | allowed | ||
| ) |
Set the entries corresponding to a name. With each of the known names in the collision matrix, form a pair using the name specified as argument to this function and set the entry as indicated by allowed. As the set of known names might change in future, consider using setDefaultEntry() instead!
- Parameters
-
name the object name allowed If false, indicates that collisions between two elements must be checked for and no collisions will be ignored (AllowedCollision::NEVER). If true, indicates that collisions between two elements are ok and an explicit collision computation is not necessary (AllowedCollision::ALWAYS).
Definition at line 231 of file collision_matrix.cpp.

◆ setEntry() [3/6]
| void collision_detection::AllowedCollisionMatrix::setEntry | ( | const std::string & | name, |
| const std::vector< std::string > & | other_names, | ||
| bool | allowed | ||
| ) |
Set multiple entries. Pairs of names are formed using name and other_names.
- Parameters
-
name name of first element other_names names of all other elements to pair with first element. The collision matrix entries will be set for all such pairs. allowed If false, indicates that collisions between two elements must be checked for and no collisions will be ignored (AllowedCollision::NEVER). If true, indicates that collisions between two elements are ok and an explicit collision computation is not necessary (AllowedCollision::ALWAYS).
Definition at line 216 of file collision_matrix.cpp.

◆ setEntry() [4/6]
| void collision_detection::AllowedCollisionMatrix::setEntry | ( | const std::string & | name1, |
| const std::string & | name2, | ||
| bool | allowed | ||
| ) |
Set an entry corresponding to a pair of elements.
- Parameters
-
name1 name of first element name2 name of second element allowed If false, indicates that collisions between two elements must be checked for and no collisions will be ignored (AllowedCollision::NEVER). If true, indicates that collisions between two elements are ok and an explicit collision computation is not necessary (AllowedCollision::ALWAYS).
Definition at line 145 of file collision_matrix.cpp.
◆ setEntry() [5/6]
| void collision_detection::AllowedCollisionMatrix::setEntry | ( | const std::string & | name1, |
| const std::string & | name2, | ||
| DecideContactFn & | fn | ||
| ) |
Set an entry corresponding to a pair of elements.
This sets the type of the entry to AllowedCollision::CONDITIONAL.
- Parameters
-
name1 name of first element name2 name of second element fn A callback function that is used to decide if collisions are allowed between the two elements
Definition at line 167 of file collision_matrix.cpp.
◆ setEntry() [6/6]
| void collision_detection::AllowedCollisionMatrix::setEntry | ( | const std::vector< std::string > & | names1, |
| const std::vector< std::string > & | names2, | ||
| bool | allowed | ||
| ) |
Set an entry corresponding to all possible pairs between two sets of elements.
- Parameters
-
names1 First set of names names2 Second set of names allowed If false, indicates that collisions between two elements must be checked for and no collisions will be ignored (AllowedCollision::NEVER). If true, indicates that collisions between two elements are ok and an explicit collision computation is not necessary (AllowedCollision::ALWAYS).
Definition at line 224 of file collision_matrix.cpp.

The documentation for this class was generated from the following files:
- moveit_core/collision_detection/include/moveit/collision_detection/collision_matrix.h
- moveit_core/collision_detection/src/collision_matrix.cpp