Namespaces | |
| AllowedCollision | |
| Any pair of bodies can have a collision state associated to it. | |
| BodyTypes | |
| The types of bodies that are considered for collision. | |
| DistanceRequestTypes | |
Classes | |
| class | CollisionDetectorAllocatorAllValid |
| An allocator for AllValid collision detectors. More... | |
| class | CollisionEnvAllValid |
| Collision environment which always just returns no collisions. More... | |
| struct | Contact |
| Definition of a contact point. More... | |
| struct | CostSource |
| When collision costs are computed, this structure contains information about the partial cost incurred in a particular volume. More... | |
| struct | DistanceRequest |
| Representation of a distance-reporting request. More... | |
| struct | DistanceResultsData |
| Generic representation of the distance information for a pair of objects. More... | |
| struct | DistanceResult |
| Result of a distance request. More... | |
| struct | CollisionResult |
| Representation of a collision checking result. More... | |
| struct | CollisionRequest |
| Representation of a collision checking request. More... | |
| class | CollisionDetectorAllocator |
| An allocator for a compatible CollisionWorld/CollisionRobot pair. More... | |
| class | CollisionDetectorAllocatorTemplate |
| Template class to make it easy to create an allocator for a specific CollisionWorld/CollisionRobot pair. More... | |
| class | CollisionEnv |
| Provides the interface to the individual collision checking libraries. More... | |
| class | AllowedCollisionMatrix |
| Definition of a structure for the allowed collision matrix. All elements in the collision world are referred to by their names. This class represents which collisions are allowed to happen and which are not. More... | |
| class | CollisionPlugin |
| Plugin API for loading a custom collision detection robot/world. More... | |
| class | CollisionPluginCache |
| class | OccMapTree |
| class | World |
| Maintain a representation of the environment. More... | |
| class | WorldDiff |
| Maintain a diff list of changes that have happened to a World. More... | |
| class | CollisionDetectorAllocatorBullet |
| An allocator for Bullet collision detectors. More... | |
| class | CollisionDetectorBtPluginLoader |
| class | CollisionEnvBullet |
More... | |
| struct | CollisionGeometryData |
| Wrapper around world, link and attached objects' geometry data. More... | |
| struct | CollisionData |
| Data structure which is passed to the collision callback function of the collision manager. More... | |
| struct | DistanceData |
| Data structure which is passed to the distance callback function of the collision manager. More... | |
| struct | FCLGeometry |
| Bundles the CollisionGeometryData and FCL collision geometry representation into a single class. More... | |
| struct | FCLObject |
| A general high-level object which consists of multiple FCLCollisionObjects. It is the top level data structure which is used in the collision checking process. More... | |
| struct | FCLManager |
| Bundles an FCLObject and a broadphase FCL collision manager. More... | |
| class | CollisionDetectorAllocatorFCL |
| An allocator for FCL collision detectors. More... | |
| class | CollisionDetectorFCLPluginLoader |
| class | CollisionEnvFCL |
| FCL implementation of the CollisionEnv. More... | |
| struct | FCLShapeCache |
| Cache for an arbitrary type of shape. It is assigned during the execution of createCollisionGeometry(). More... | |
| struct | GroupStateRepresentation |
| struct | DistanceFieldCacheEntry |
| class | CollisionDetectorAllocatorDistanceField |
| An allocator for Distance Field collision detectors. More... | |
| class | CollisionDetectorAllocatorHybrid |
| An allocator for Hybrid collision detectors. More... | |
| struct | CollisionSphere |
| struct | GradientInfo |
| class | PosedDistanceField |
| class | BodyDecomposition |
| class | PosedBodySphereDecomposition |
| class | PosedBodyPointDecomposition |
| class | PosedBodySphereDecompositionVector |
| class | PosedBodyPointDecompositionVector |
| struct | ProximityInfo |
| class | CollisionEnvDistanceField |
| class | CollisionEnvHybrid |
| This hybrid collision environment combines FCL and a distance field. Both can be used to calculate collisions. More... | |
| struct | BodyDecompositionCache |
| class | CollisionRobotDistanceFieldROS |
| class | CollisionRobotHybridROS |
| class | CollisionPluginLoader |
Typedefs | |
| using | BodyType = BodyTypes::Type |
| The types of bodies that are considered for collision. More... | |
| using | DistanceRequestType = DistanceRequestTypes::DistanceRequestType |
| using | DistanceMap = std::map< const std::pair< std::string, std::string >, std::vector< DistanceResultsData > > |
| Mapping between the names of the collision objects and the DistanceResultData. More... | |
| using | DecideContactFn = std::function< bool(collision_detection::Contact &)> |
| Signature of predicate that decides whether a contact is allowed or not (when AllowedCollision::Type is CONDITIONAL) More... | |
| typedef octomap::OcTreeNode | OccMapNode |
| using | OccMapTreePtr = std::shared_ptr< OccMapTree > |
| using | OccMapTreeConstPtr = std::shared_ptr< const OccMapTree > |
| typedef std::shared_ptr< fcl::CollisionObjectd > | FCLCollisionObjectPtr |
| typedef std::shared_ptr< const fcl::CollisionObjectd > | FCLCollisionObjectConstPtr |
Enumerations | |
| enum | CollisionType { NONE = 0 , SELF = 1 , INTRA = 2 , ENVIRONMENT = 3 } |
Functions | |
| MOVEIT_CLASS_FORWARD (AllowedCollisionMatrix) | |
| MOVEIT_CLASS_FORWARD (CollisionDetectorAllocator) | |
| MOVEIT_CLASS_FORWARD (CollisionEnv) | |
| int | refineContactNormals (const World::ObjectConstPtr &object, CollisionResult &res, double cell_bbx_search_distance=1.0, double allowed_angle_divergence=0.0, bool estimate_depth=false, double iso_value=0.5, double metaball_radius_multiple=1.5) |
| Re-proceses contact normals for an octomap by estimating a metaball iso-surface using the centers of occupied cells in a neighborhood of the contact point. More... | |
| MOVEIT_CLASS_FORWARD (CollisionPlugin) | |
| void | getCollisionMarkersFromContacts (visualization_msgs::msg::MarkerArray &arr, const std::string &frame_id, const CollisionResult::ContactMap &con, const std_msgs::msg::ColorRGBA &color, const rclcpp::Duration &lifetime, const double radius=0.035) |
| void | getCollisionMarkersFromContacts (visualization_msgs::msg::MarkerArray &arr, const std::string &frame_id, const CollisionResult::ContactMap &con) |
| void | getCostMarkers (visualization_msgs::msg::MarkerArray &arr, const std::string &frame_id, std::set< CostSource > &cost_sources) |
| void | getCostMarkers (visualization_msgs::msg::MarkerArray &arr, const std::string &frame_id, std::set< CostSource > &cost_sources, const std_msgs::msg::ColorRGBA &color, const rclcpp::Duration &lifetime) |
| double | getTotalCost (const std::set< CostSource > &cost_sources) |
| void | removeCostSources (std::set< CostSource > &cost_sources, const std::set< CostSource > &cost_sources_to_remove, double overlap_fraction) |
| void | intersectCostSources (std::set< CostSource > &cost_sources, const std::set< CostSource > &a, const std::set< CostSource > &b) |
| void | removeOverlapping (std::set< CostSource > &cost_sources, double overlap_fraction) |
| bool | getSensorPositioning (geometry_msgs::msg::Point &point, const std::set< CostSource > &cost_sources) |
| void | costSourceToMsg (const CostSource &cost_source, moveit_msgs::msg::CostSource &msg) |
| void | contactToMsg (const Contact &contact, moveit_msgs::msg::ContactInformation &msg) |
| MOVEIT_CLASS_FORWARD (World) | |
| MOVEIT_CLASS_FORWARD (WorldDiff) | |
| MOVEIT_STRUCT_FORWARD (CollisionGeometryData) | |
| MOVEIT_STRUCT_FORWARD (FCLGeometry) | |
| bool | collisionCallback (fcl::CollisionObjectd *o1, fcl::CollisionObjectd *o2, void *data) |
| Callback function used by the FCLManager used for each pair of collision objects to calculate object contact information. More... | |
| bool | distanceCallback (fcl::CollisionObjectd *o1, fcl::CollisionObjectd *o2, void *data, double &min_dist) |
| Callback function used by the FCLManager used for each pair of collision objects to calculate collisions and distances. More... | |
| FCLGeometryConstPtr | createCollisionGeometry (const shapes::ShapeConstPtr &shape, const moveit::core::LinkModel *link, int shape_index) |
| Create new FCLGeometry object out of robot link model. More... | |
| FCLGeometryConstPtr | createCollisionGeometry (const shapes::ShapeConstPtr &shape, const moveit::core::AttachedBody *ab, int shape_index) |
| Create new FCLGeometry object out of attached body. More... | |
| FCLGeometryConstPtr | createCollisionGeometry (const shapes::ShapeConstPtr &shape, const World::Object *obj) |
| Create new FCLGeometry object out of a world object. More... | |
| FCLGeometryConstPtr | createCollisionGeometry (const shapes::ShapeConstPtr &shape, double scale, double padding, const moveit::core::LinkModel *link, int shape_index) |
| Create new scaled and / or padded FCLGeometry object out of robot link model. More... | |
| FCLGeometryConstPtr | createCollisionGeometry (const shapes::ShapeConstPtr &shape, double scale, double padding, const moveit::core::AttachedBody *ab, int shape_index) |
| Create new scaled and / or padded FCLGeometry object out of an attached body. More... | |
| FCLGeometryConstPtr | createCollisionGeometry (const shapes::ShapeConstPtr &shape, double scale, double padding, const World::Object *obj) |
| Create new scaled and / or padded FCLGeometry object out of an world object. More... | |
| void | cleanCollisionGeometryCache () |
| Increases the counter of the caches which can trigger the cleaning of expired entries from them. More... | |
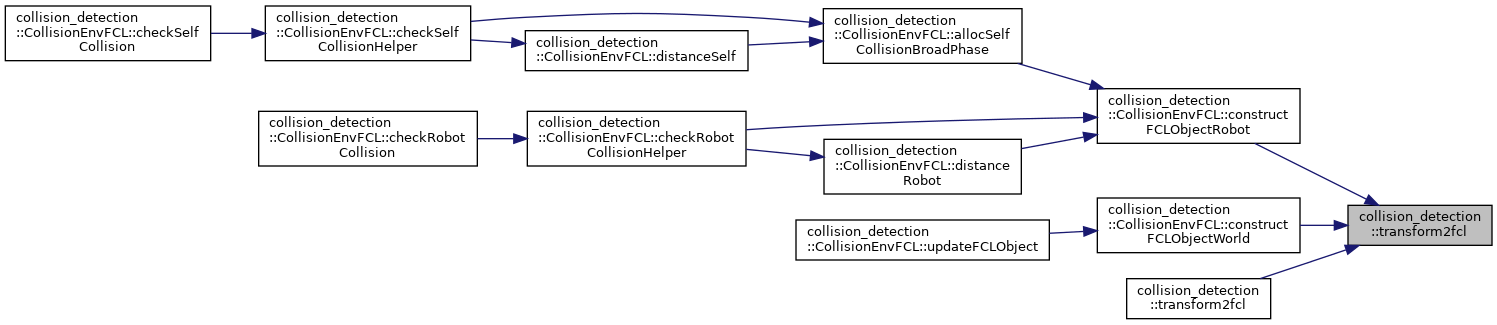
| void | transform2fcl (const Eigen::Isometry3d &b, fcl::Transform3d &f) |
| Transforms an Eigen Isometry3d to FCL coordinate transformation. More... | |
| fcl::Transform3d | transform2fcl (const Eigen::Isometry3d &b) |
| Transforms an Eigen Isometry3d to FCL coordinate transformation. More... | |
| void | fcl2contact (const fcl::Contactd &fc, Contact &c) |
| Transforms an FCL contact into a MoveIt contact point. More... | |
| void | fcl2costsource (const fcl::CostSourced &fcs, CostSource &cs) |
| Transforms the FCL internal representation to the MoveIt CostSource data structure. More... | |
| template<typename BV , typename T > | |
| FCLShapeCache & | GetShapeCache () |
| template<typename BV , typename T > | |
| FCLGeometryConstPtr | createCollisionGeometry (const shapes::ShapeConstPtr &shape, const T *data, int shape_index) |
| Templated helper function creating new collision geometry out of general object using an arbitrary bounding volume (BV). More... | |
| template<typename BV , typename T > | |
| FCLGeometryConstPtr | createCollisionGeometry (const shapes::ShapeConstPtr &shape, double scale, double padding, const T *data, int shape_index) |
| Templated helper function creating new collision geometry out of general object using an arbitrary bounding volume (BV). This can include padding and scaling. More... | |
| MOVEIT_STRUCT_FORWARD (GroupStateRepresentation) | |
| MOVEIT_STRUCT_FORWARD (DistanceFieldCacheEntry) | |
| BodyDecompositionConstPtr | getBodyDecompositionCacheEntry (const shapes::ShapeConstPtr &shape, double resolution) |
| PosedBodyPointDecompositionVectorPtr | getCollisionObjectPointDecomposition (const collision_detection::World::Object &obj, double resolution) |
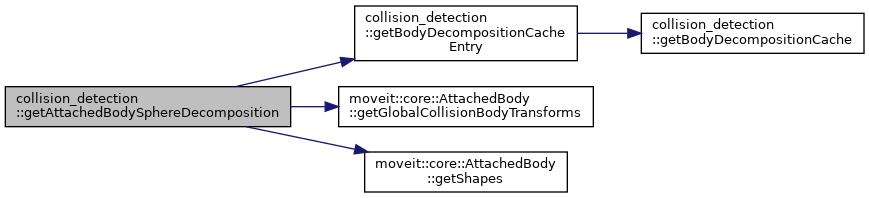
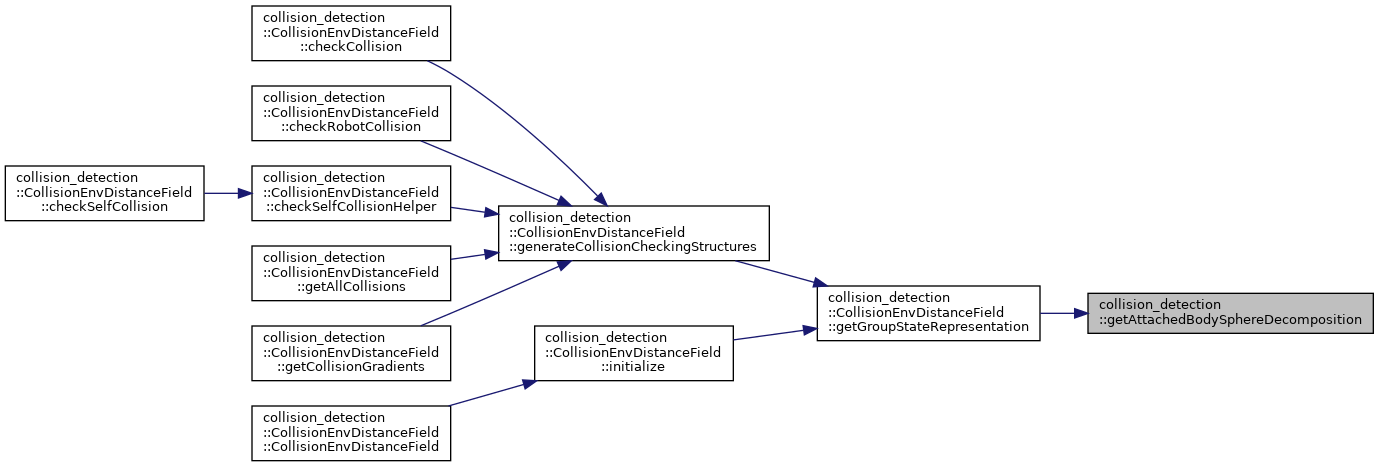
| PosedBodySphereDecompositionVectorPtr | getAttachedBodySphereDecomposition (const moveit::core::AttachedBody *att, double resolution) |
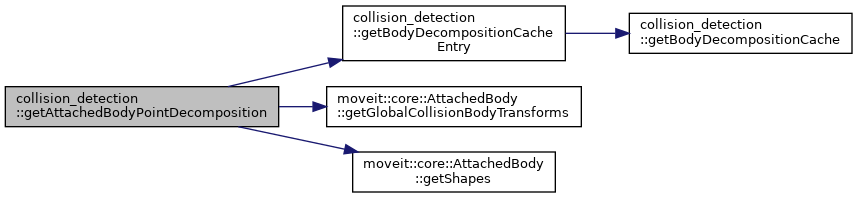
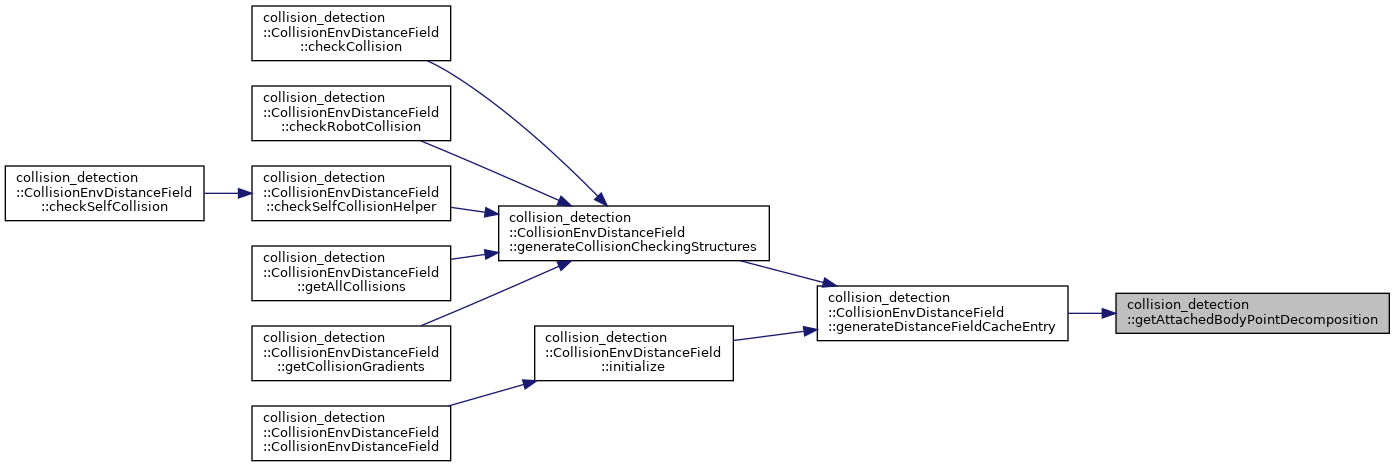
| PosedBodyPointDecompositionVectorPtr | getAttachedBodyPointDecomposition (const moveit::core::AttachedBody *att, double resolution) |
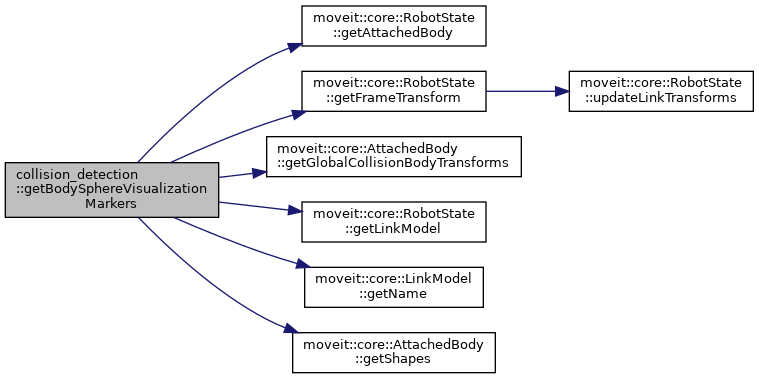
| void | getBodySphereVisualizationMarkers (const GroupStateRepresentationPtr &gsr, const std::string &reference_frame, visualization_msgs::msg::MarkerArray &body_marker_array) |
| MOVEIT_CLASS_FORWARD (PosedDistanceField) | |
| MOVEIT_CLASS_FORWARD (BodyDecomposition) | |
| MOVEIT_CLASS_FORWARD (PosedBodySphereDecomposition) | |
| MOVEIT_CLASS_FORWARD (PosedBodyPointDecomposition) | |
| MOVEIT_CLASS_FORWARD (PosedBodySphereDecompositionVector) | |
| MOVEIT_CLASS_FORWARD (PosedBodyPointDecompositionVector) | |
| std::vector< CollisionSphere > | determineCollisionSpheres (const bodies::Body *body, Eigen::Isometry3d &relativeTransform) |
| bool | getCollisionSphereGradients (const distance_field::DistanceField *distance_field, const std::vector< CollisionSphere > &sphere_list, const EigenSTL::vector_Vector3d &sphere_centers, GradientInfo &gradient, const CollisionType &type, double tolerance, bool subtract_radii, double maximum_value, bool stop_at_first_collision) |
| bool | getCollisionSphereCollision (const distance_field::DistanceField *distance_field, const std::vector< CollisionSphere > &sphere_list, const EigenSTL::vector_Vector3d &sphere_centers, double maximum_value, double tolerance) |
| bool | getCollisionSphereCollision (const distance_field::DistanceField *distance_field, const std::vector< CollisionSphere > &sphere_list, const EigenSTL::vector_Vector3d &sphere_centers, double maximum_value, double tolerance, unsigned int num_coll, std::vector< unsigned int > &colls) |
| bool | doBoundingSpheresIntersect (const PosedBodySphereDecompositionConstPtr &p1, const PosedBodySphereDecompositionConstPtr &p2) |
| void | getCollisionSphereMarkers (const std_msgs::msg::ColorRGBA &color, const std::string &frame_id, const std::string &ns, const rclcpp::Duration &dur, const std::vector< PosedBodySphereDecompositionPtr > &posed_decompositions, visualization_msgs::msg::MarkerArray &arr) |
| void | getProximityGradientMarkers (const std::string &frame_id, const std::string &ns, const rclcpp::Duration &dur, const std::vector< PosedBodySphereDecompositionPtr > &posed_decompositions, const std::vector< PosedBodySphereDecompositionVectorPtr > &posed_vector_decompositions, const std::vector< GradientInfo > &gradients, visualization_msgs::msg::MarkerArray &arr) |
| void | getCollisionMarkers (const std::string &frame_id, const std::string &ns, const rclcpp::Duration &dur, const std::vector< PosedBodySphereDecompositionPtr > &posed_decompositions, const std::vector< PosedBodySphereDecompositionVectorPtr > &posed_vector_decompositions, const std::vector< GradientInfo > &gradients, visualization_msgs::msg::MarkerArray &arr) |
| MOVEIT_CLASS_FORWARD (CollisionEnvDistanceField) | |
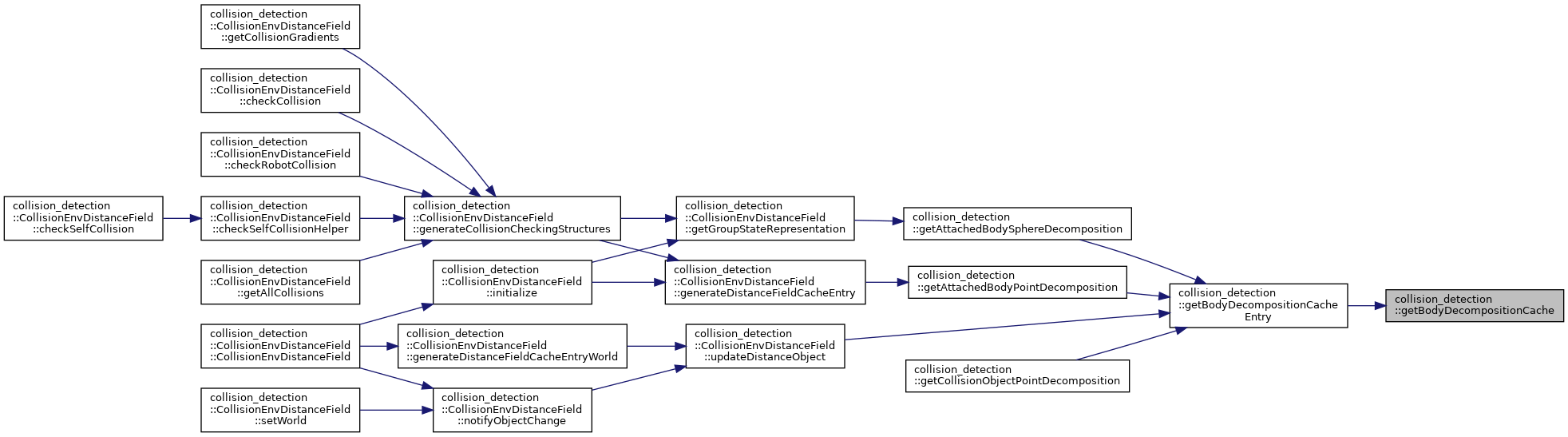
| BodyDecompositionCache & | getBodyDecompositionCache () |
| void | getBodySphereVisualizationMarkers (const GroupStateRepresentationConstPtr &gsr, const std::string &reference_frame, visualization_msgs::msg::MarkerArray &body_marker_array) |
Variables | |
| const double | MAX_DISTANCE_MARGIN = 99 |
| const double | EPSILON = 0.001f |
Detailed Description
Typedef Documentation
◆ BodyType
| using collision_detection::BodyType = typedef BodyTypes::Type |
The types of bodies that are considered for collision.
Definition at line 70 of file collision_common.h.
◆ DecideContactFn
| using collision_detection::DecideContactFn = typedef std::function<bool(collision_detection::Contact&)> |
Signature of predicate that decides whether a contact is allowed or not (when AllowedCollision::Type is CONDITIONAL)
Definition at line 71 of file collision_matrix.h.
◆ DistanceMap
| using collision_detection::DistanceMap = typedef std::map<const std::pair<std::string, std::string>, std::vector<DistanceResultsData> > |
Mapping between the names of the collision objects and the DistanceResultData.
Definition at line 273 of file collision_common.h.
◆ DistanceRequestType
Definition at line 154 of file collision_common.h.
◆ FCLCollisionObjectConstPtr
| typedef std::shared_ptr<const fcl::CollisionObjectd> collision_detection::FCLCollisionObjectConstPtr |
Definition at line 251 of file collision_common.h.
◆ FCLCollisionObjectPtr
| typedef std::shared_ptr<fcl::CollisionObjectd> collision_detection::FCLCollisionObjectPtr |
Definition at line 250 of file collision_common.h.
◆ OccMapNode
| typedef octomap::OcTreeNode collision_detection::OccMapNode |
Definition at line 49 of file occupancy_map.h.
◆ OccMapTreeConstPtr
| using collision_detection::OccMapTreeConstPtr = typedef std::shared_ptr<const OccMapTree> |
Definition at line 119 of file occupancy_map.h.
◆ OccMapTreePtr
| using collision_detection::OccMapTreePtr = typedef std::shared_ptr<OccMapTree> |
Definition at line 118 of file occupancy_map.h.
Enumeration Type Documentation
◆ CollisionType
| Enumerator | |
|---|---|
| NONE | |
| SELF | |
| INTRA | |
| ENVIRONMENT | |
Definition at line 62 of file collision_distance_field_types.h.
Function Documentation
◆ cleanCollisionGeometryCache()
| void collision_detection::cleanCollisionGeometryCache | ( | ) |
Increases the counter of the caches which can trigger the cleaning of expired entries from them.
Definition at line 940 of file collision_common.cpp.


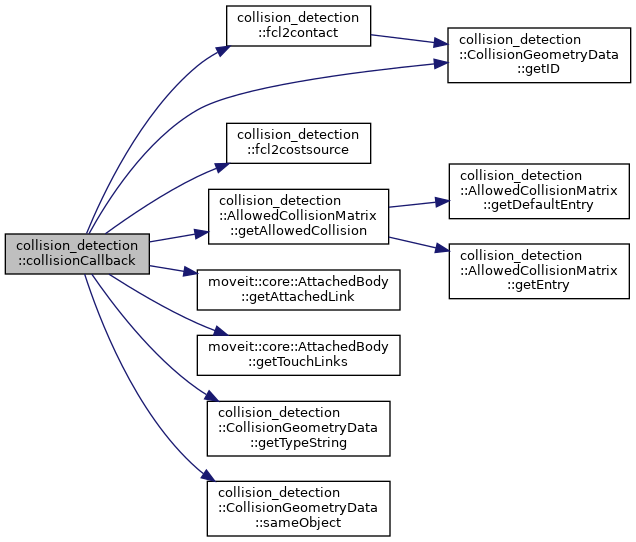
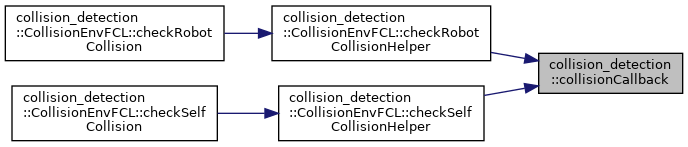
◆ collisionCallback()
| bool collision_detection::collisionCallback | ( | fcl::CollisionObjectd * | o1, |
| fcl::CollisionObjectd * | o2, | ||
| void * | data | ||
| ) |
Callback function used by the FCLManager used for each pair of collision objects to calculate object contact information.
- Parameters
-
o1 First FCL collision object o2 Second FCL collision object \data General pointer to arbitrary data which is used during the callback
- Returns
- True terminates the collision check, false continues it to the next pair of objects
Definition at line 61 of file collision_common.cpp.
◆ contactToMsg()
| void collision_detection::contactToMsg | ( | const Contact & | contact, |
| moveit_msgs::msg::ContactInformation & | msg | ||
| ) |
Definition at line 276 of file collision_tools.cpp.
◆ costSourceToMsg()
| void collision_detection::costSourceToMsg | ( | const CostSource & | cost_source, |
| moveit_msgs::msg::CostSource & | msg | ||
| ) |
Definition at line 265 of file collision_tools.cpp.
◆ createCollisionGeometry() [1/8]
| FCLGeometryConstPtr collision_detection::createCollisionGeometry | ( | const shapes::ShapeConstPtr & | shape, |
| const moveit::core::AttachedBody * | ab, | ||
| int | shape_index | ||
| ) |
Create new FCLGeometry object out of attached body.
Definition at line 894 of file collision_common.cpp.
◆ createCollisionGeometry() [2/8]
| FCLGeometryConstPtr collision_detection::createCollisionGeometry | ( | const shapes::ShapeConstPtr & | shape, |
| const moveit::core::LinkModel * | link, | ||
| int | shape_index | ||
| ) |
Create new FCLGeometry object out of robot link model.
Definition at line 888 of file collision_common.cpp.

◆ createCollisionGeometry() [3/8]
| FCLGeometryConstPtr collision_detection::createCollisionGeometry | ( | const shapes::ShapeConstPtr & | shape, |
| const T * | data, | ||
| int | shape_index | ||
| ) |
Templated helper function creating new collision geometry out of general object using an arbitrary bounding volume (BV).
It assigns a thread-local cache for each type of shape and minimizes memory usage and copying through utilizing the cache.
Definition at line 710 of file collision_common.cpp.

◆ createCollisionGeometry() [4/8]
| FCLGeometryConstPtr collision_detection::createCollisionGeometry | ( | const shapes::ShapeConstPtr & | shape, |
| const World::Object * | obj | ||
| ) |
Create new FCLGeometry object out of a world object.
A world object always consists only of a single shape, therefore we don't need the shape_index.
Definition at line 900 of file collision_common.cpp.
◆ createCollisionGeometry() [5/8]
| FCLGeometryConstPtr collision_detection::createCollisionGeometry | ( | const shapes::ShapeConstPtr & | shape, |
| double | scale, | ||
| double | padding, | ||
| const moveit::core::AttachedBody * | ab, | ||
| int | shape_index | ||
| ) |
Create new scaled and / or padded FCLGeometry object out of an attached body.
Definition at line 928 of file collision_common.cpp.
◆ createCollisionGeometry() [6/8]
| FCLGeometryConstPtr collision_detection::createCollisionGeometry | ( | const shapes::ShapeConstPtr & | shape, |
| double | scale, | ||
| double | padding, | ||
| const moveit::core::LinkModel * | link, | ||
| int | shape_index | ||
| ) |
Create new scaled and / or padded FCLGeometry object out of robot link model.
Definition at line 922 of file collision_common.cpp.
◆ createCollisionGeometry() [7/8]
| FCLGeometryConstPtr collision_detection::createCollisionGeometry | ( | const shapes::ShapeConstPtr & | shape, |
| double | scale, | ||
| double | padding, | ||
| const T * | data, | ||
| int | shape_index | ||
| ) |
Templated helper function creating new collision geometry out of general object using an arbitrary bounding volume (BV). This can include padding and scaling.
Definition at line 908 of file collision_common.cpp.
◆ createCollisionGeometry() [8/8]
| FCLGeometryConstPtr collision_detection::createCollisionGeometry | ( | const shapes::ShapeConstPtr & | shape, |
| double | scale, | ||
| double | padding, | ||
| const World::Object * | obj | ||
| ) |
Create new scaled and / or padded FCLGeometry object out of an world object.
Definition at line 934 of file collision_common.cpp.
◆ determineCollisionSpheres()
| std::vector< CollisionSphere > collision_detection::determineCollisionSpheres | ( | const bodies::Body * | body, |
| Eigen::Isometry3d & | relativeTransform | ||
| ) |
Definition at line 53 of file collision_distance_field_types.cpp.

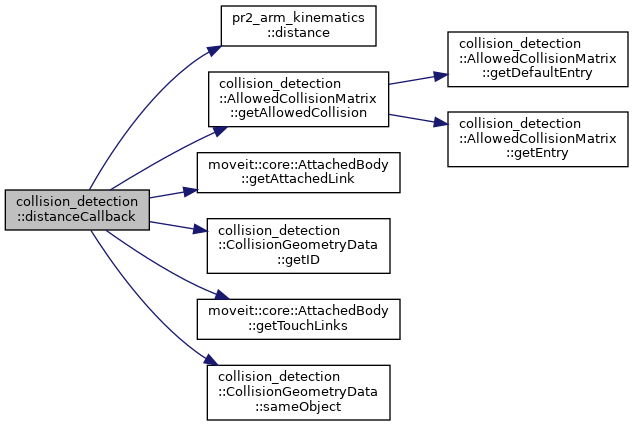
◆ distanceCallback()
| bool collision_detection::distanceCallback | ( | fcl::CollisionObjectd * | o1, |
| fcl::CollisionObjectd * | o2, | ||
| void * | data, | ||
| double & | min_dist | ||
| ) |
Callback function used by the FCLManager used for each pair of collision objects to calculate collisions and distances.
- Parameters
-
o1 First FCL collision object o2 Second FCL collision object \data General pointer to arbitrary data which is used during the callback
- Returns
- True terminates the distance check, false continues it to the next pair of objects
Definition at line 430 of file collision_common.cpp.

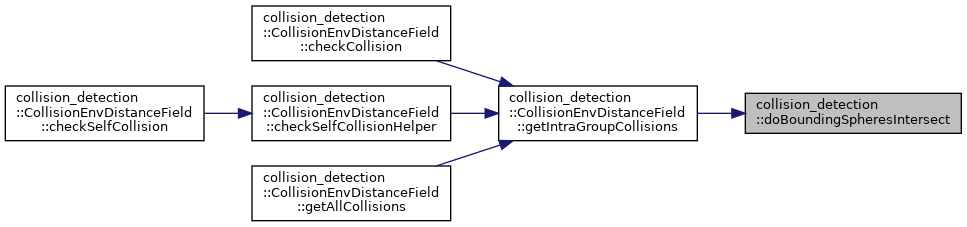
◆ doBoundingSpheresIntersect()
| bool collision_detection::doBoundingSpheresIntersect | ( | const PosedBodySphereDecompositionConstPtr & | p1, |
| const PosedBodySphereDecompositionConstPtr & | p2 | ||
| ) |
Definition at line 402 of file collision_distance_field_types.cpp.
◆ fcl2contact()
|
inline |
Transforms an FCL contact into a MoveIt contact point.
Definition at line 342 of file collision_common.h.


◆ fcl2costsource()
|
inline |
Transforms the FCL internal representation to the MoveIt CostSource data structure.
Definition at line 356 of file collision_common.h.

◆ getAttachedBodyPointDecomposition()
| PosedBodyPointDecompositionVectorPtr collision_detection::getAttachedBodyPointDecomposition | ( | const moveit::core::AttachedBody * | att, |
| double | resolution | ||
| ) |
Definition at line 122 of file collision_common_distance_field.cpp.
◆ getAttachedBodySphereDecomposition()
| PosedBodySphereDecompositionVectorPtr collision_detection::getAttachedBodySphereDecomposition | ( | const moveit::core::AttachedBody * | att, |
| double | resolution | ||
| ) |
Definition at line 108 of file collision_common_distance_field.cpp.
◆ getBodyDecompositionCache()
| BodyDecompositionCache& collision_detection::getBodyDecompositionCache | ( | ) |
Definition at line 64 of file collision_common_distance_field.cpp.
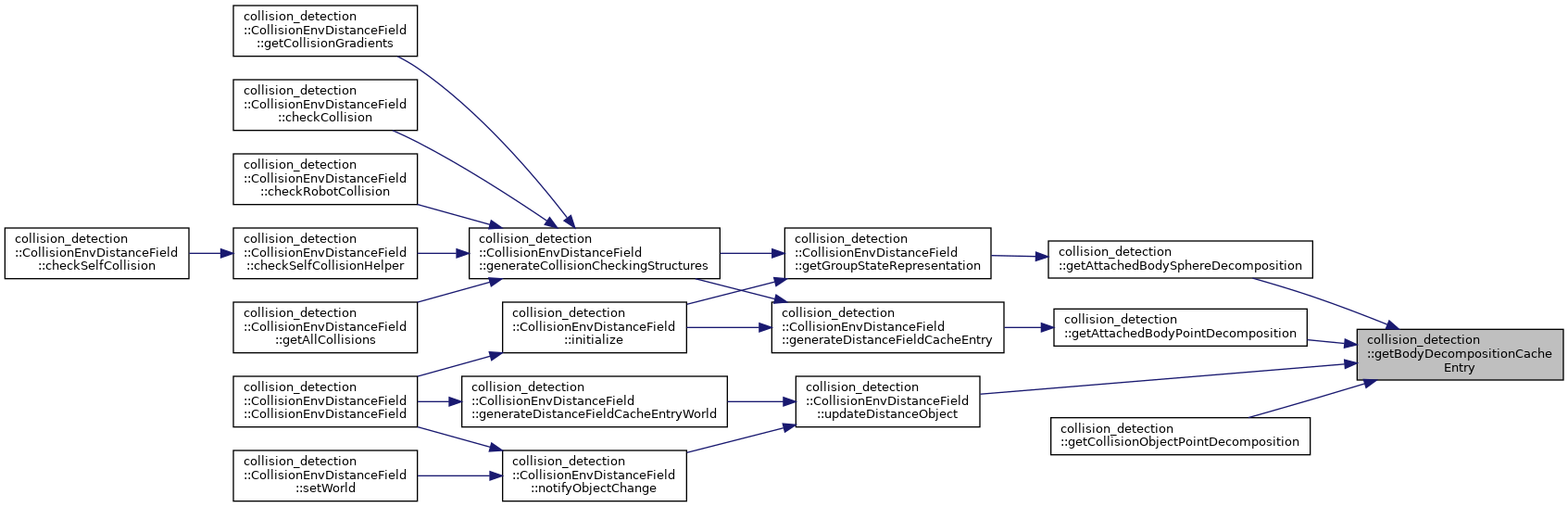
◆ getBodyDecompositionCacheEntry()
| BodyDecompositionConstPtr collision_detection::getBodyDecompositionCacheEntry | ( | const shapes::ShapeConstPtr & | shape, |
| double | resolution | ||
| ) |
Definition at line 70 of file collision_common_distance_field.cpp.

◆ getBodySphereVisualizationMarkers() [1/2]
| void collision_detection::getBodySphereVisualizationMarkers | ( | const GroupStateRepresentationConstPtr & | gsr, |
| const std::string & | reference_frame, | ||
| visualization_msgs::msg::MarkerArray & | body_marker_array | ||
| ) |
Definition at line 136 of file collision_common_distance_field.cpp.
◆ getBodySphereVisualizationMarkers() [2/2]
| void collision_detection::getBodySphereVisualizationMarkers | ( | const GroupStateRepresentationPtr & | gsr, |
| const std::string & | reference_frame, | ||
| visualization_msgs::msg::MarkerArray & | body_marker_array | ||
| ) |
◆ getCollisionMarkers()
| void collision_detection::getCollisionMarkers | ( | const std::string & | frame_id, |
| const std::string & | ns, | ||
| const rclcpp::Duration & | dur, | ||
| const std::vector< PosedBodySphereDecompositionPtr > & | posed_decompositions, | ||
| const std::vector< PosedBodySphereDecompositionVectorPtr > & | posed_vector_decompositions, | ||
| const std::vector< GradientInfo > & | gradients, | ||
| visualization_msgs::msg::MarkerArray & | arr | ||
| ) |
Definition at line 545 of file collision_distance_field_types.cpp.
◆ getCollisionMarkersFromContacts() [1/2]
| void collision_detection::getCollisionMarkersFromContacts | ( | visualization_msgs::msg::MarkerArray & | arr, |
| const std::string & | frame_id, | ||
| const CollisionResult::ContactMap & | con | ||
| ) |

◆ getCollisionMarkersFromContacts() [2/2]
| void collision_detection::getCollisionMarkersFromContacts | ( | visualization_msgs::msg::MarkerArray & | arr, |
| const std::string & | frame_id, | ||
| const CollisionResult::ContactMap & | con, | ||
| const std_msgs::msg::ColorRGBA & | color, | ||
| const rclcpp::Duration & | lifetime, | ||
| const double | radius = 0.035 |
||
| ) |

◆ getCollisionObjectPointDecomposition()
| PosedBodyPointDecompositionVectorPtr collision_detection::getCollisionObjectPointDecomposition | ( | const collision_detection::World::Object & | obj, |
| double | resolution | ||
| ) |
Definition at line 94 of file collision_common_distance_field.cpp.

◆ getCollisionSphereCollision() [1/2]
| bool collision_detection::getCollisionSphereCollision | ( | const distance_field::DistanceField * | distance_field, |
| const std::vector< CollisionSphere > & | sphere_list, | ||
| const EigenSTL::vector_Vector3d & | sphere_centers, | ||
| double | maximum_value, | ||
| double | tolerance | ||
| ) |
Definition at line 205 of file collision_distance_field_types.cpp.
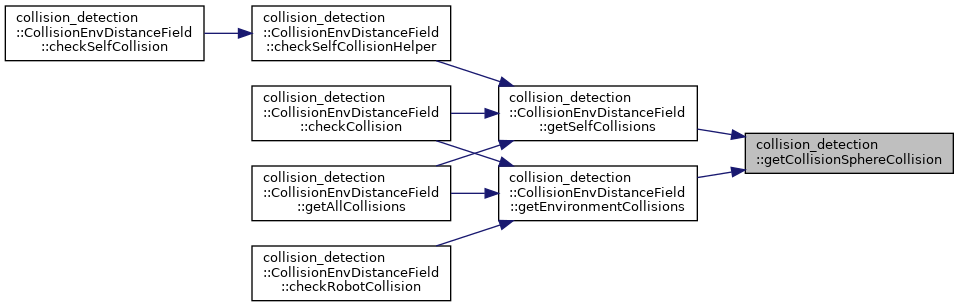
◆ getCollisionSphereCollision() [2/2]
| bool collision_detection::getCollisionSphereCollision | ( | const distance_field::DistanceField * | distance_field, |
| const std::vector< CollisionSphere > & | sphere_list, | ||
| const EigenSTL::vector_Vector3d & | sphere_centers, | ||
| double | maximum_value, | ||
| double | tolerance, | ||
| unsigned int | num_coll, | ||
| std::vector< unsigned int > & | colls | ||
| ) |
Definition at line 232 of file collision_distance_field_types.cpp.
◆ getCollisionSphereGradients()
| bool collision_detection::getCollisionSphereGradients | ( | const distance_field::DistanceField * | distance_field, |
| const std::vector< CollisionSphere > & | sphere_list, | ||
| const EigenSTL::vector_Vector3d & | sphere_centers, | ||
| GradientInfo & | gradient, | ||
| const CollisionType & | type, | ||
| double | tolerance, | ||
| bool | subtract_radii, | ||
| double | maximum_value, | ||
| bool | stop_at_first_collision | ||
| ) |
Definition at line 144 of file collision_distance_field_types.cpp.

◆ getCollisionSphereMarkers()
| void collision_detection::getCollisionSphereMarkers | ( | const std_msgs::msg::ColorRGBA & | color, |
| const std::string & | frame_id, | ||
| const std::string & | ns, | ||
| const rclcpp::Duration & | dur, | ||
| const std::vector< PosedBodySphereDecompositionPtr > & | posed_decompositions, | ||
| visualization_msgs::msg::MarkerArray & | arr | ||
| ) |
Definition at line 414 of file collision_distance_field_types.cpp.
◆ getCostMarkers() [1/2]
| void collision_detection::getCostMarkers | ( | visualization_msgs::msg::MarkerArray & | arr, |
| const std::string & | frame_id, | ||
| std::set< CostSource > & | cost_sources | ||
| ) |
- Todo:
- add a class for managing cost sources
Definition at line 44 of file collision_tools.cpp.
◆ getCostMarkers() [2/2]
| void collision_detection::getCostMarkers | ( | visualization_msgs::msg::MarkerArray & | arr, |
| const std::string & | frame_id, | ||
| std::set< CostSource > & | cost_sources, | ||
| const std_msgs::msg::ColorRGBA & | color, | ||
| const rclcpp::Duration & | lifetime | ||
| ) |
Definition at line 66 of file collision_tools.cpp.
◆ getProximityGradientMarkers()
| void collision_detection::getProximityGradientMarkers | ( | const std::string & | frame_id, |
| const std::string & | ns, | ||
| const rclcpp::Duration & | dur, | ||
| const std::vector< PosedBodySphereDecompositionPtr > & | posed_decompositions, | ||
| const std::vector< PosedBodySphereDecompositionVectorPtr > & | posed_vector_decompositions, | ||
| const std::vector< GradientInfo > & | gradients, | ||
| visualization_msgs::msg::MarkerArray & | arr | ||
| ) |
Definition at line 445 of file collision_distance_field_types.cpp.
◆ getSensorPositioning()
| bool collision_detection::getSensorPositioning | ( | geometry_msgs::msg::Point & | point, |
| const std::set< CostSource > & | cost_sources | ||
| ) |
Definition at line 138 of file collision_tools.cpp.
◆ GetShapeCache()
| FCLShapeCache& collision_detection::GetShapeCache | ( | ) |
Definition at line 689 of file collision_common.cpp.
◆ getTotalCost()
| double collision_detection::getTotalCost | ( | const std::set< CostSource > & | cost_sources | ) |
Definition at line 151 of file collision_tools.cpp.
◆ intersectCostSources()
| void collision_detection::intersectCostSources | ( | std::set< CostSource > & | cost_sources, |
| const std::set< CostSource > & | a, | ||
| const std::set< CostSource > & | b | ||
| ) |
Definition at line 159 of file collision_tools.cpp.
◆ MOVEIT_CLASS_FORWARD() [1/13]
| collision_detection::MOVEIT_CLASS_FORWARD | ( | AllowedCollisionMatrix | ) |
◆ MOVEIT_CLASS_FORWARD() [2/13]
| collision_detection::MOVEIT_CLASS_FORWARD | ( | BodyDecomposition | ) |
◆ MOVEIT_CLASS_FORWARD() [3/13]
| collision_detection::MOVEIT_CLASS_FORWARD | ( | CollisionDetectorAllocator | ) |
◆ MOVEIT_CLASS_FORWARD() [4/13]
| collision_detection::MOVEIT_CLASS_FORWARD | ( | CollisionEnv | ) |
◆ MOVEIT_CLASS_FORWARD() [5/13]
| collision_detection::MOVEIT_CLASS_FORWARD | ( | CollisionEnvDistanceField | ) |
◆ MOVEIT_CLASS_FORWARD() [6/13]
| collision_detection::MOVEIT_CLASS_FORWARD | ( | CollisionPlugin | ) |
◆ MOVEIT_CLASS_FORWARD() [7/13]
| collision_detection::MOVEIT_CLASS_FORWARD | ( | PosedBodyPointDecomposition | ) |
◆ MOVEIT_CLASS_FORWARD() [8/13]
| collision_detection::MOVEIT_CLASS_FORWARD | ( | PosedBodyPointDecompositionVector | ) |
◆ MOVEIT_CLASS_FORWARD() [9/13]
| collision_detection::MOVEIT_CLASS_FORWARD | ( | PosedBodySphereDecomposition | ) |
◆ MOVEIT_CLASS_FORWARD() [10/13]
| collision_detection::MOVEIT_CLASS_FORWARD | ( | PosedBodySphereDecompositionVector | ) |
◆ MOVEIT_CLASS_FORWARD() [11/13]
| collision_detection::MOVEIT_CLASS_FORWARD | ( | PosedDistanceField | ) |
◆ MOVEIT_CLASS_FORWARD() [12/13]
| collision_detection::MOVEIT_CLASS_FORWARD | ( | World | ) |
◆ MOVEIT_CLASS_FORWARD() [13/13]
| collision_detection::MOVEIT_CLASS_FORWARD | ( | WorldDiff | ) |
◆ MOVEIT_STRUCT_FORWARD() [1/4]
| collision_detection::MOVEIT_STRUCT_FORWARD | ( | CollisionGeometryData | ) |
◆ MOVEIT_STRUCT_FORWARD() [2/4]
| collision_detection::MOVEIT_STRUCT_FORWARD | ( | DistanceFieldCacheEntry | ) |
◆ MOVEIT_STRUCT_FORWARD() [3/4]
| collision_detection::MOVEIT_STRUCT_FORWARD | ( | FCLGeometry | ) |
◆ MOVEIT_STRUCT_FORWARD() [4/4]
| collision_detection::MOVEIT_STRUCT_FORWARD | ( | GroupStateRepresentation | ) |
◆ refineContactNormals()
| int collision_detection::refineContactNormals | ( | const World::ObjectConstPtr & | object, |
| CollisionResult & | res, | ||
| double | cell_bbx_search_distance = 1.0, |
||
| double | allowed_angle_divergence = 0.0, |
||
| bool | estimate_depth = false, |
||
| double | iso_value = 0.5, |
||
| double | metaball_radius_multiple = 1.5 |
||
| ) |
Re-proceses contact normals for an octomap by estimating a metaball iso-surface using the centers of occupied cells in a neighborhood of the contact point.
This is an implementation of the algorithm described in: A. Leeper, S. Chan, K. Salisbury. Point Clouds Can Be Represented as Implicit Surfaces for Constraint-Based Haptic Rendering. ICRA, May 2012, St Paul, MN. http://adamleeper.com/research/papers/2012_ICRA_leeper-chan-salisbury.pdf
- Parameters
-
The octomap originally used for collision detection. The collision result (which will get its normals updated) The distance, as a multiple of the octomap cell size, from which to include neighboring cells. The minimum angle change required for a normal to be over-written Whether to request a depth estimate from the algorithm (experimental...) The iso-surface threshold value (0.5 is a reasonable default). The metaball radius, as a multiple of the octomap cell size (1.5 is a reasonable default)
Definition at line 62 of file collision_octomap_filter.cpp.
◆ removeCostSources()
| void collision_detection::removeCostSources | ( | std::set< CostSource > & | cost_sources, |
| const std::set< CostSource > & | cost_sources_to_remove, | ||
| double | overlap_fraction | ||
| ) |

◆ removeOverlapping()
| void collision_detection::removeOverlapping | ( | std::set< CostSource > & | cost_sources, |
| double | overlap_fraction | ||
| ) |

◆ transform2fcl() [1/2]
|
inline |
Transforms an Eigen Isometry3d to FCL coordinate transformation.
Definition at line 334 of file collision_common.h.

◆ transform2fcl() [2/2]
|
inline |
Transforms an Eigen Isometry3d to FCL coordinate transformation.
Definition at line 321 of file collision_common.h.
Variable Documentation
◆ EPSILON
| const double collision_detection::EPSILON = 0.001f |
Definition at line 56 of file collision_env_distance_field.cpp.
◆ MAX_DISTANCE_MARGIN
| const double collision_detection::MAX_DISTANCE_MARGIN = 99 |
Definition at line 50 of file collision_env_bullet.cpp.