#include <problem_description.h>
Holds all the data for a trajectory optimization problem so you can modify it programmatically, e.g. add your own costs
Definition at line 186 of file problem_description.h.
◆ TrajOptProblem() [1/2]
| trajopt_interface::TrajOptProblem::TrajOptProblem |
( |
| ) |
|
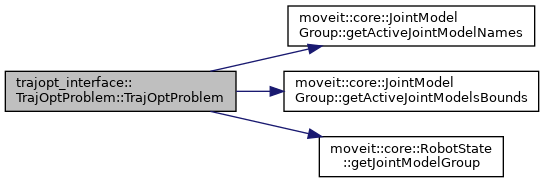
◆ TrajOptProblem() [2/2]
| trajopt_interface::TrajOptProblem::TrajOptProblem |
( |
const ProblemInfo & |
problem_info | ) |
|
◆ ~TrajOptProblem()
| virtual trajopt_interface::TrajOptProblem::~TrajOptProblem |
( |
| ) |
|
|
virtualdefault |
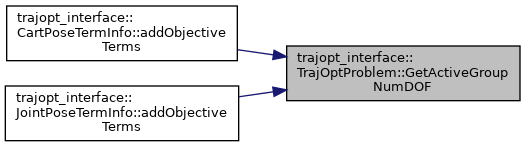
◆ GetActiveGroupNumDOF()
| int trajopt_interface::TrajOptProblem::GetActiveGroupNumDOF |
( |
| ) |
|
|
inline |
◆ GetHasTime()
| bool trajopt_interface::TrajOptProblem::GetHasTime |
( |
| ) |
|
|
inline |
◆ GetInitTraj()
| trajopt::TrajArray trajopt_interface::TrajOptProblem::GetInitTraj |
( |
| ) |
|
|
inline |
◆ GetNumDOF()
| int trajopt_interface::TrajOptProblem::GetNumDOF |
( |
| ) |
|
|
inline |
Returns the problem DOF. This is the number of columns in the optization matrix. Note that this is not necessarily the same as the kinematic DOF.
Definition at line 218 of file problem_description.h.
◆ GetNumSteps()
| int trajopt_interface::TrajOptProblem::GetNumSteps |
( |
| ) |
|
|
inline |
Returns the number of steps in the problem. This is the number of rows in the optimization matrix.
Definition at line 212 of file problem_description.h.
◆ GetPlanningScene()
| planning_scene::PlanningSceneConstPtr trajopt_interface::TrajOptProblem::GetPlanningScene |
( |
| ) |
|
|
inline |
◆ GetVar()
| sco::Var& trajopt_interface::TrajOptProblem::GetVar |
( |
int |
i, |
|
|
int |
j |
|
) |
| |
|
inline |
Returns the value of the specified joint j for the specified timestep i.
Definition at line 203 of file problem_description.h.
◆ GetVarRow() [1/2]
| sco::VarVector trajopt_interface::TrajOptProblem::GetVarRow |
( |
int |
i | ) |
|
|
inline |
◆ GetVarRow() [2/2]
| sco::VarVector trajopt_interface::TrajOptProblem::GetVarRow |
( |
int |
i, |
|
|
int |
start_col, |
|
|
int |
num_col |
|
) |
| |
|
inline |
Returns the values of the specified joints (start_col to num_col) for the specified timestep i.
Definition at line 193 of file problem_description.h.
◆ GetVars()
| trajopt::VarArray& trajopt_interface::TrajOptProblem::GetVars |
( |
| ) |
|
|
inline |
◆ SetHasTime()
| void trajopt_interface::TrajOptProblem::SetHasTime |
( |
bool |
tmp | ) |
|
|
inline |
◆ SetInitTraj()
| void trajopt_interface::TrajOptProblem::SetInitTraj |
( |
const trajopt::TrajArray & |
x | ) |
|
|
inline |
The documentation for this class was generated from the following files: