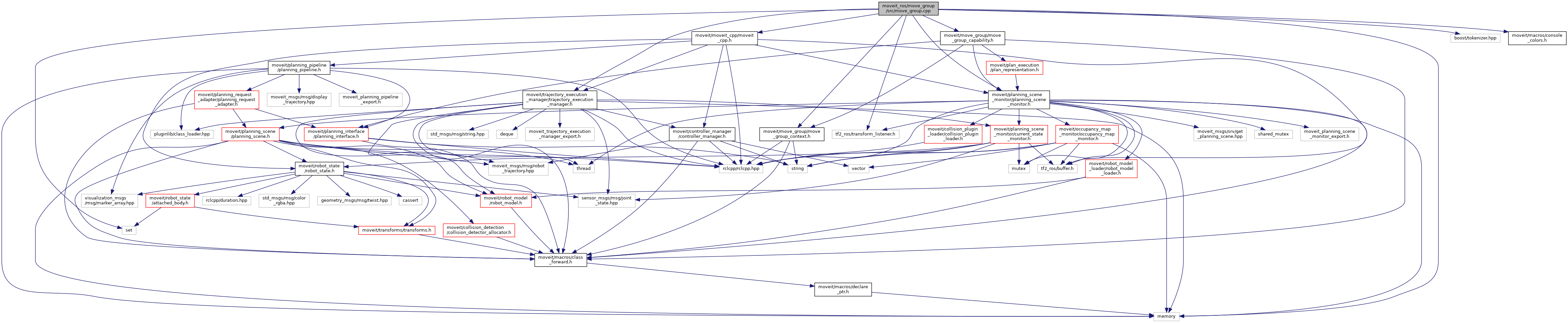
#include <moveit/moveit_cpp/moveit_cpp.h>#include <moveit/planning_scene_monitor/planning_scene_monitor.h>#include <tf2_ros/transform_listener.h>#include <moveit/move_group/move_group_capability.h>#include <moveit/trajectory_execution_manager/trajectory_execution_manager.h>#include <boost/tokenizer.hpp>#include <moveit/macros/console_colors.h>#include <moveit/move_group/move_group_context.h>#include <memory>#include <set>
Include dependency graph for move_group.cpp:
Go to the source code of this file.
Classes | |
| class | move_group::MoveGroupExe |
Namespaces | |
| move_group | |
Functions | |
| int | main (int argc, char **argv) |
Function Documentation
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 204 of file move_group.cpp.