Classes | |
| struct | JointLimits |
| struct | SoftJointLimits |
Functions | |
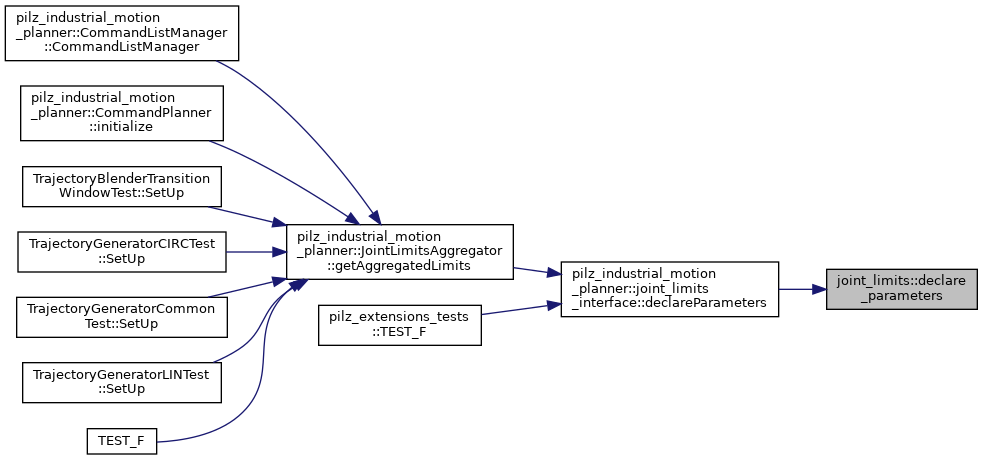
| bool | declare_parameters (const std::string &joint_name, const rclcpp::Node::SharedPtr &node, const std::string ¶m_ns) |
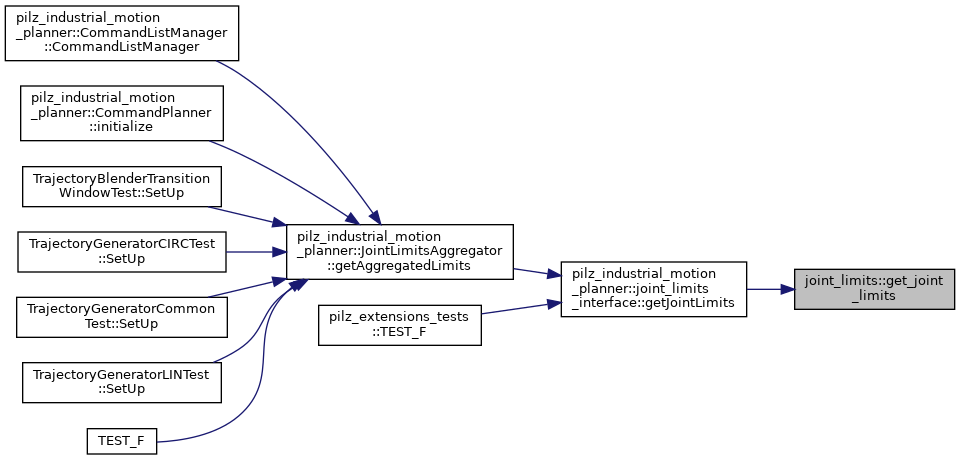
| bool | get_joint_limits (const std::string &joint_name, const rclcpp::Node::SharedPtr &node, const std::string ¶m_ns, JointLimits &limits) |
| Populate a JointLimits instance from the ROS parameter server. More... | |
| bool | get_joint_limits (const std::string &joint_name, const rclcpp::Node::SharedPtr &node, const std::string ¶m_ns, SoftJointLimits &soft_limits) |
| Populate a SoftJointLimits instance from the ROS parameter server. More... | |
Detailed Description
Function Documentation
◆ declare_parameters()
|
inline |
Definition at line 44 of file joint_limits_rosparam.hpp.

◆ get_joint_limits() [1/2]
|
inline |
Populate a JointLimits instance from the ROS parameter server.
It is assumed that the following parameter structure is followed on the provided NodeHandle. Unspecified parameters are simply not added to the joint limits specification.
This specification is similar to the one used by MoveIt!, but additionally supports jerk and effort limits.
- Parameters
-
[in] joint_name Name of joint whose limits are to be fetched. [in] node NodeHandle where the joint limits are specified. [out] limits Where joint limit data gets written into. Limits specified in the parameter server will overwrite existing values. Values in limitsnot specified in the parameter server remain unchanged.
- Returns
- True if a limits specification is found (ie. the
joint_limits/joint_nameparameter exists innode), false otherwise.
Definition at line 112 of file joint_limits_rosparam.hpp.
◆ get_joint_limits() [2/2]
|
inline |
Populate a SoftJointLimits instance from the ROS parameter server.
It is assumed that the following parameter structure is followed on the provided NodeHandle. Only completely specified soft joint limits specifications will be considered valid.
This specification is similar to the specification of the safety_controller tag in the URDF, adapted to the parameter server.
- Parameters
-
[in] joint_name Name of joint whose limits are to be fetched. [in] node NodeHandle where the joint limits are specified. [out] soft_limits Where soft joint limit data gets written into. Limits specified in the parameter server will overwrite existing values.
- Returns
- True if a complete soft limits specification is found (ie. if all
k_position,k_velocity,soft_lower_limitandsoft_upper_limitexist injoint_limits/joint_namenamespace), false otherwise.
Definition at line 257 of file joint_limits_rosparam.hpp.