#include <pilz_industrial_motion_planner/planning_context_loader.h>#include <moveit/planning_interface/planning_interface.h>
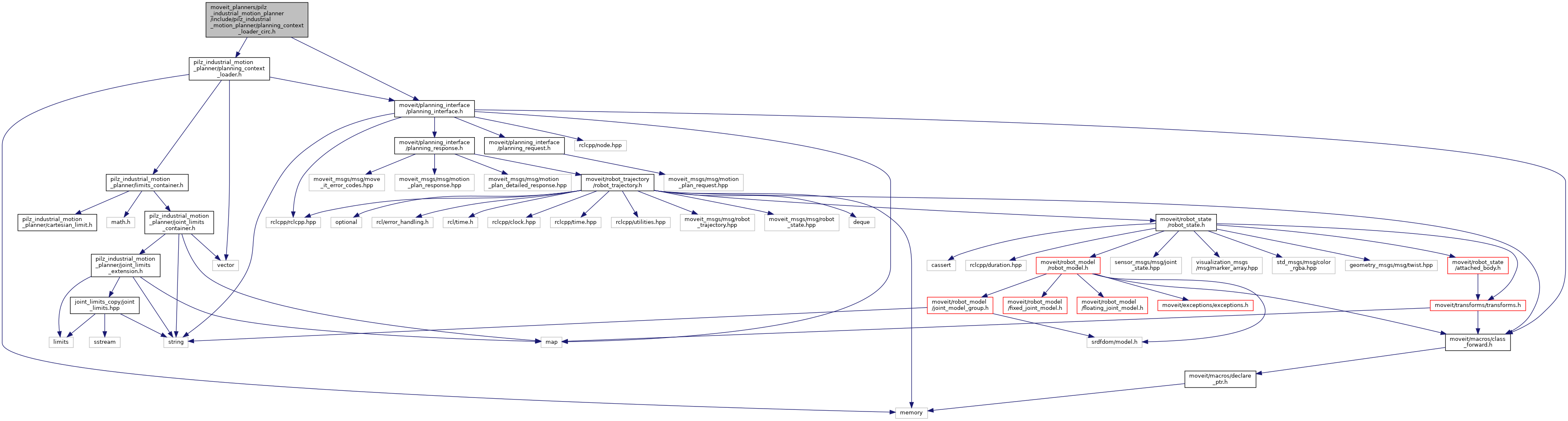
Include dependency graph for planning_context_loader_circ.h:
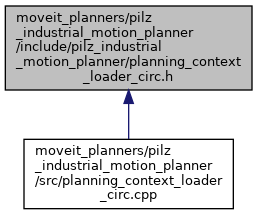
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | pilz_industrial_motion_planner::PlanningContextLoaderCIRC |
| Plugin that can generate instances of PlanningContextCIRC. Generates instances of PlanningContextLIN. More... | |
Namespaces | |
| pilz_industrial_motion_planner | |
Typedefs | |
| typedef std::shared_ptr< PlanningContextLoaderCIRC > | pilz_industrial_motion_planner::PlanningContextLoaderCIRCPtr |
| typedef std::shared_ptr< const PlanningContextLoaderCIRC > | pilz_industrial_motion_planner::PlanningContextLoaderCIRCConstPtr |