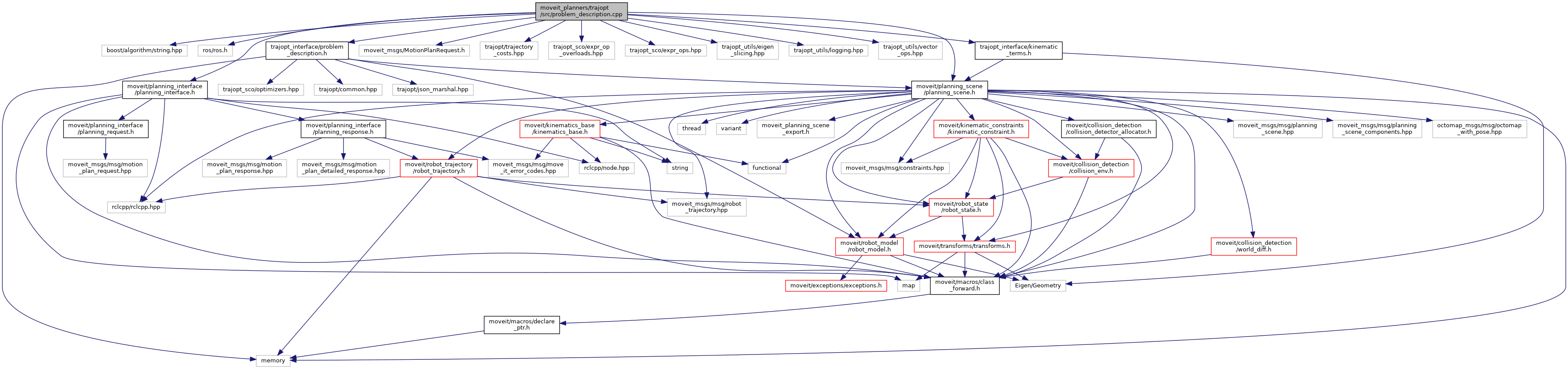
#include <boost/algorithm/string.hpp>#include <ros/ros.h>#include <moveit/planning_interface/planning_interface.h>#include <moveit/planning_scene/planning_scene.h>#include <moveit_msgs/MotionPlanRequest.h>#include <trajopt/trajectory_costs.hpp>#include <trajopt_sco/expr_op_overloads.hpp>#include <trajopt_sco/expr_ops.hpp>#include <trajopt_utils/eigen_slicing.hpp>#include <trajopt_utils/logging.hpp>#include <trajopt_utils/vector_ops.hpp>#include <trajopt_interface/problem_description.h>#include <trajopt_interface/kinematic_terms.h>
Include dependency graph for problem_description.cpp:
Go to the source code of this file.
Namespaces | |
| trajopt_interface | |
Functions | |
| void | checkParameterSize (trajopt::DblVec ¶meter, const unsigned int &expected_size, const std::string &name, const bool &apply_first=true) |
| Checks the size of the parameter given and throws if incorrect. More... | |
| TrajOptProblemPtr | trajopt_interface::ConstructProblem (const ProblemInfo &) |
| void | trajopt_interface::generateInitialTrajectory (const ProblemInfo &pci, const std::vector< double > ¤t_joint_values, trajopt::TrajArray &init_traj) |
Function Documentation
◆ checkParameterSize()
| void checkParameterSize | ( | trajopt::DblVec & | parameter, |
| const unsigned int & | expected_size, | ||
| const std::string & | name, | ||
| const bool & | apply_first = true |
||
| ) |
Checks the size of the parameter given and throws if incorrect.
- Parameters
-
parameter The vector whose size is getting checked expected_size The expected size of the vector name The name to use when printing an error or warning apply_first If true and only one value is given, broadcast value to length of expected_size
Definition at line 59 of file problem_description.cpp.
Here is the caller graph for this function: