Joint space position cost Position operates on a single point (unlike velocity, etc). This is b/c the primary usecase is joint-space position waypoints. More...
#include <problem_description.h>
Public Member Functions | |
| JointPoseTermInfo () | |
| Initialize term with it's supported types. More... | |
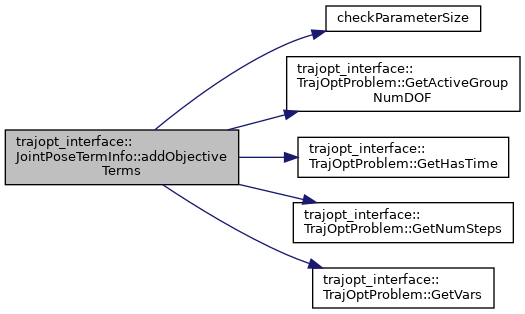
| void | addObjectiveTerms (TrajOptProblem &prob) override |
| Converts term info into cost/constraint and adds it to trajopt problem. More... | |
 Public Member Functions inherited from trajopt_interface::TermInfo Public Member Functions inherited from trajopt_interface::TermInfo | |
| int | getSupportedTypes () |
| TermInfo ()=default | |
| TermInfo (const TermInfo &)=default | |
| TermInfo (TermInfo &&)=default | |
| TermInfo & | operator= (const TermInfo &)=default |
| TermInfo & | operator= (TermInfo &&)=default |
| virtual | ~TermInfo ()=default |
Static Public Member Functions | |
| static TermInfoPtr | create () |
| Static Public Member Functions inherited from trajopt_interface::TermInfo | |
| static TermInfoPtr | fromName (const std::string &type) |
| static void | RegisterMaker (const std::string &type, MakerFunc) |
Public Attributes | |
| trajopt::DblVec | coeffs |
| Vector of coefficients that scale the cost. Size should be the DOF of the system. Default: vector of 0's. More... | |
| trajopt::DblVec | targets |
| Vector of position targets. This is a required value. Size should be the DOF of the system. More... | |
| trajopt::DblVec | upper_tols |
| Vector of position upper limits. Size should be the DOF of the system. Default: vector of 0's. More... | |
| trajopt::DblVec | lower_tols |
| Vector of position lower limits. Size should be the DOF of the system. Default: vector of 0's. More... | |
| int | first_step = 0 |
| First time step to which the term is applied. Default: 0. More... | |
| int | last_step = -1 |
| Last time step to which the term is applied. Default: prob.GetNumSteps() - 1. More... | |
| Public Attributes inherited from trajopt_interface::TermInfo | |
| std::string | name |
| int | term_type |
Additional Inherited Members | |
| Public Types inherited from trajopt_interface::TermInfo | |
| using | MakerFunc = TermInfoPtr(*)(void) |
| Protected Member Functions inherited from trajopt_interface::TermInfo | |
| TermInfo (int supported_term_types) | |
Detailed Description
Joint space position cost Position operates on a single point (unlike velocity, etc). This is b/c the primary usecase is joint-space position waypoints.

where  indexes over dof and
indexes over dof and  are coeffs
are coeffs
Definition at line 308 of file problem_description.h.
Constructor & Destructor Documentation
◆ JointPoseTermInfo()
|
inline |
Initialize term with it's supported types.
Definition at line 324 of file problem_description.h.
Member Function Documentation
◆ addObjectiveTerms()
|
overridevirtual |
Converts term info into cost/constraint and adds it to trajopt problem.
Implements trajopt_interface::TermInfo.
Definition at line 310 of file problem_description.cpp.
◆ create()
|
inlinestatic |
Definition at line 331 of file problem_description.h.
Member Data Documentation
◆ coeffs
| trajopt::DblVec trajopt_interface::JointPoseTermInfo::coeffs |
Vector of coefficients that scale the cost. Size should be the DOF of the system. Default: vector of 0's.
Definition at line 311 of file problem_description.h.
◆ first_step
| int trajopt_interface::JointPoseTermInfo::first_step = 0 |
First time step to which the term is applied. Default: 0.
Definition at line 319 of file problem_description.h.
◆ last_step
| int trajopt_interface::JointPoseTermInfo::last_step = -1 |
Last time step to which the term is applied. Default: prob.GetNumSteps() - 1.
Definition at line 321 of file problem_description.h.
◆ lower_tols
| trajopt::DblVec trajopt_interface::JointPoseTermInfo::lower_tols |
Vector of position lower limits. Size should be the DOF of the system. Default: vector of 0's.
Definition at line 317 of file problem_description.h.
◆ targets
| trajopt::DblVec trajopt_interface::JointPoseTermInfo::targets |
Vector of position targets. This is a required value. Size should be the DOF of the system.
Definition at line 313 of file problem_description.h.
◆ upper_tols
| trajopt::DblVec trajopt_interface::JointPoseTermInfo::upper_tols |
Vector of position upper limits. Size should be the DOF of the system. Default: vector of 0's.
Definition at line 315 of file problem_description.h.
The documentation for this struct was generated from the following files:
- moveit_planners/trajopt/include/trajopt_interface/problem_description.h
- moveit_planners/trajopt/src/problem_description.cpp