#include <moveit/kinematic_constraints/kinematic_constraint.h>#include <gtest/gtest.h>#include <urdf_parser/urdf_parser.h>#include <tf2_eigen/tf2_eigen.hpp>#include <tf2_geometry_msgs/tf2_geometry_msgs.hpp>#include <math.h>#include <moveit/utils/robot_model_test_utils.h>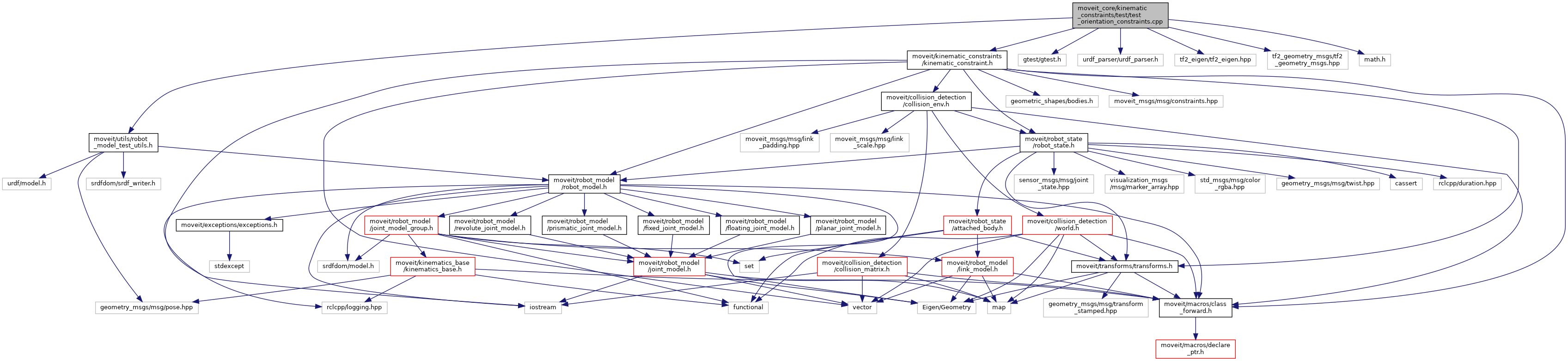
Go to the source code of this file.
Classes | |
| class | SphericalRobot |
| class | FloatingJointRobot |
Functions | |
| Eigen::Quaterniond | xyz_intrinsix_to_quat (double rx, double ry, double rz) |
| Eigen::Quaterniond | rotation_vector_to_quat (double rx, double ry, double rz) |
| void | setRobotEndEffectorOrientation (moveit::core::RobotState &robot_state, const Eigen::Quaterniond &quat) |
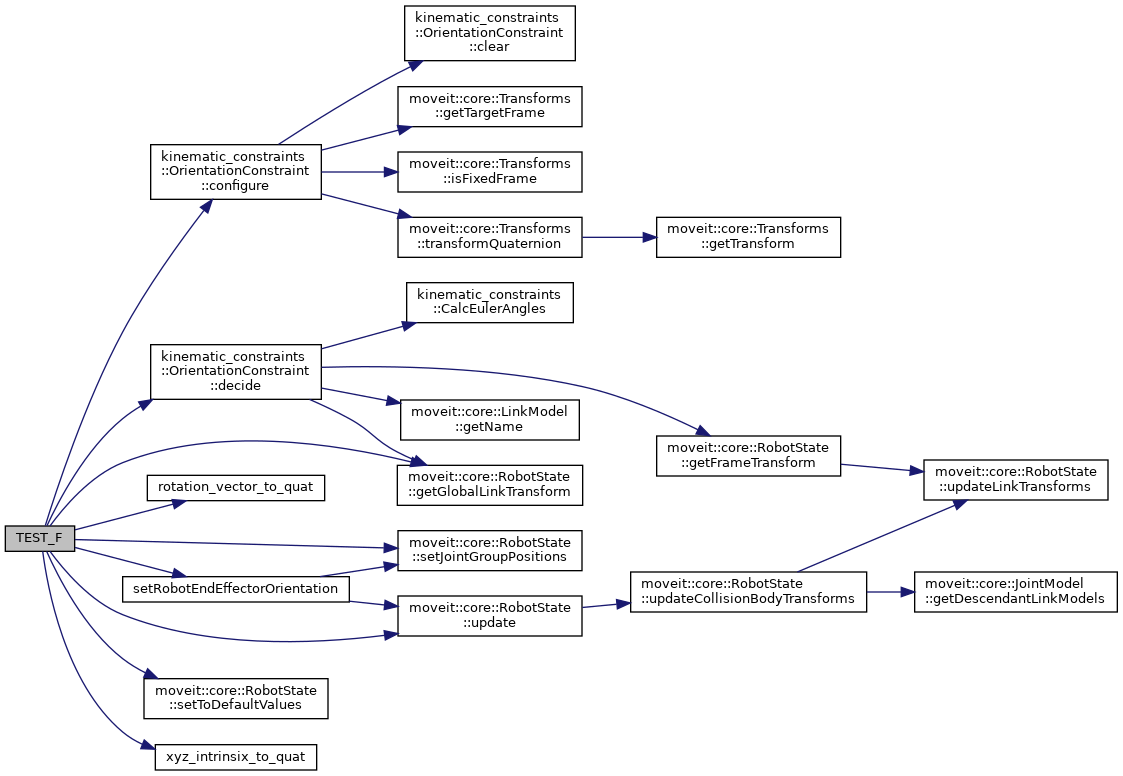
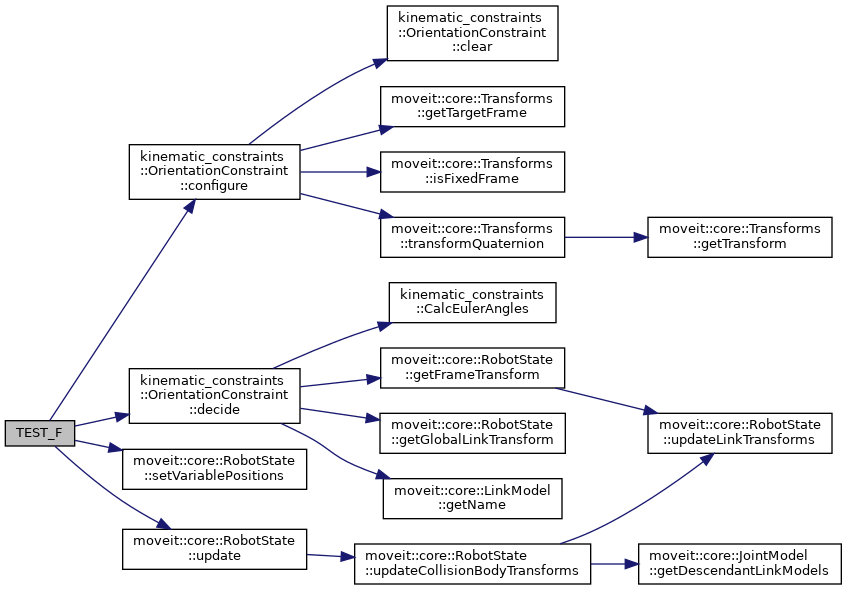
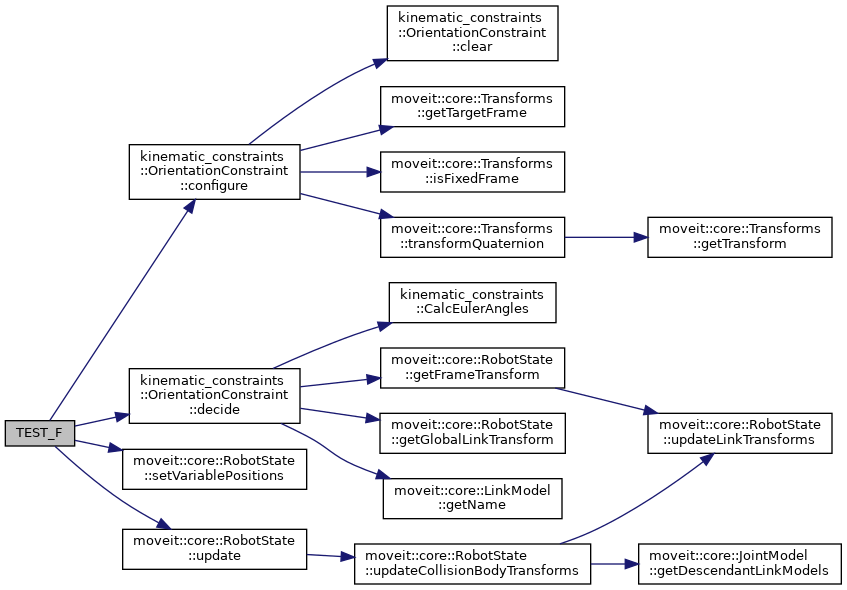
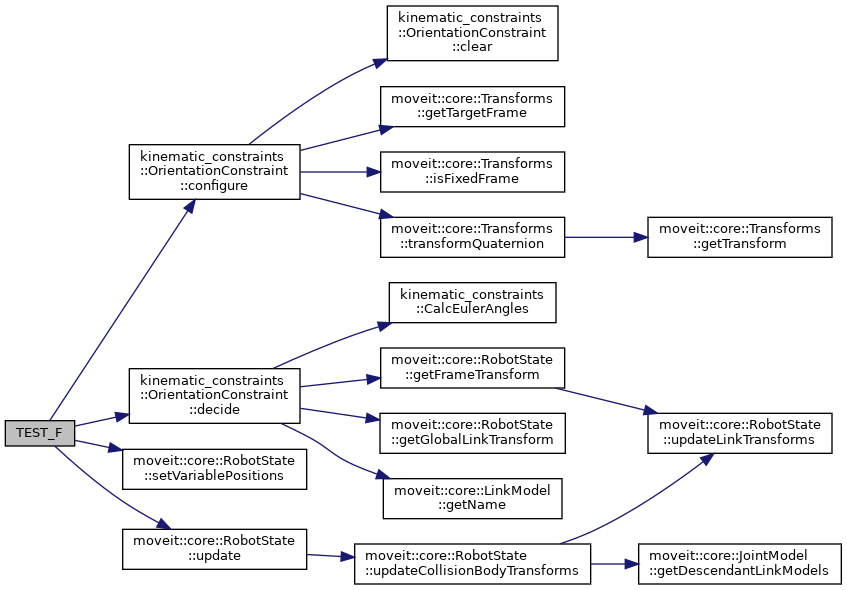
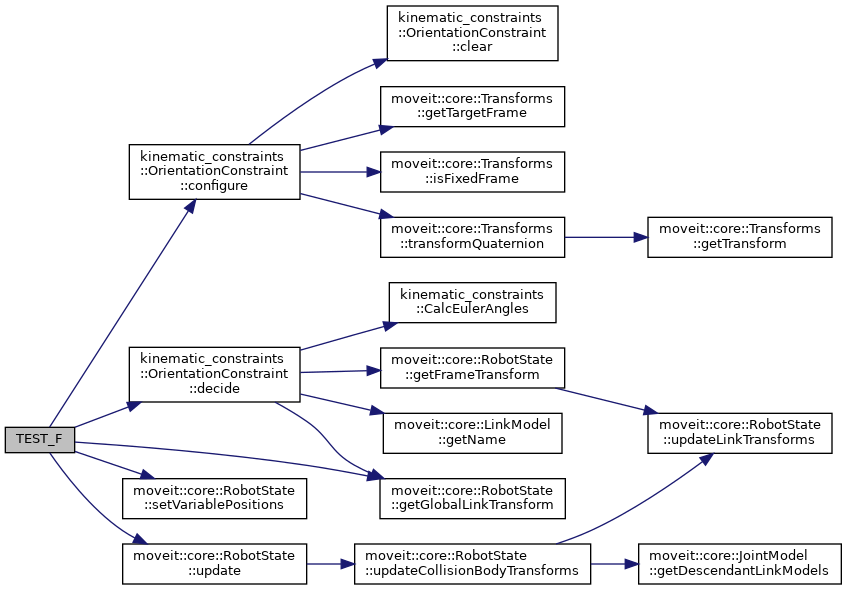
| TEST_F (SphericalRobot, Test1) | |
| TEST_F (SphericalRobot, Test2) | |
| TEST_F (SphericalRobot, Test3) | |
| TEST_F (SphericalRobot, Test4) | |
| TEST_F (SphericalRobot, Test5) | |
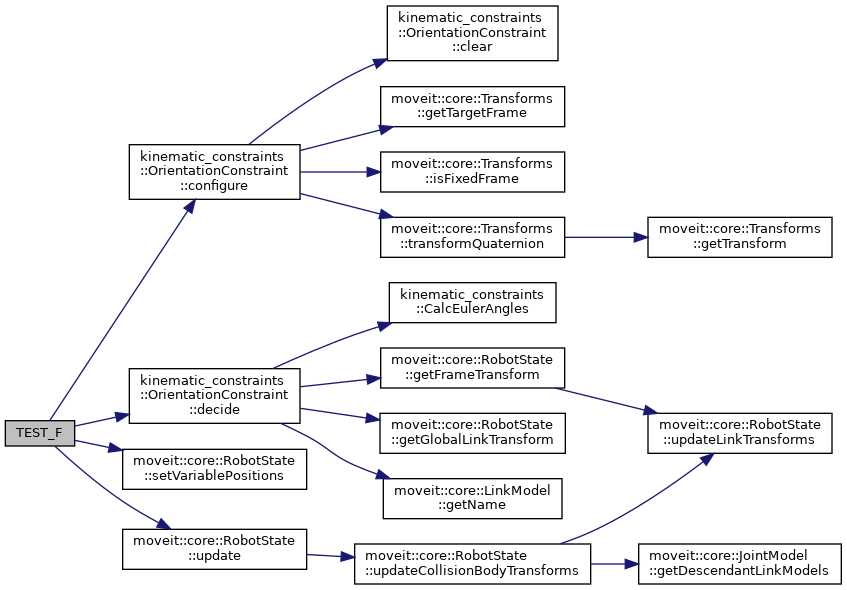
| TEST_F (FloatingJointRobot, TestDefaultParameterization) | |
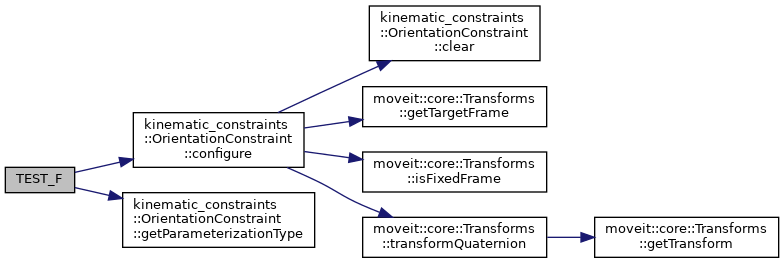
| TEST_F (FloatingJointRobot, OrientationConstraintsParameterization) | |
| int | main (int argc, char **argv) |
Function Documentation
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 478 of file test_orientation_constraints.cpp.
◆ rotation_vector_to_quat()
|
inline |
Helper function to create a quaternion from a rotation vector.
Definition at line 136 of file test_orientation_constraints.cpp.

◆ setRobotEndEffectorOrientation()
| void setRobotEndEffectorOrientation | ( | moveit::core::RobotState & | robot_state, |
| const Eigen::Quaterniond & | quat | ||
| ) |
Helper function to set the orientation of the robot end-effector for the FloatingJointRobot.
Definition at line 144 of file test_orientation_constraints.cpp.


◆ TEST_F() [1/7]
| TEST_F | ( | FloatingJointRobot | , |
| OrientationConstraintsParameterization | |||
| ) |
Definition at line 380 of file test_orientation_constraints.cpp.
◆ TEST_F() [2/7]
| TEST_F | ( | FloatingJointRobot | , |
| TestDefaultParameterization | |||
| ) |
Definition at line 352 of file test_orientation_constraints.cpp.
◆ TEST_F() [3/7]
| TEST_F | ( | SphericalRobot | , |
| Test1 | |||
| ) |
Definition at line 152 of file test_orientation_constraints.cpp.
◆ TEST_F() [4/7]
| TEST_F | ( | SphericalRobot | , |
| Test2 | |||
| ) |
Definition at line 179 of file test_orientation_constraints.cpp.
◆ TEST_F() [5/7]
| TEST_F | ( | SphericalRobot | , |
| Test3 | |||
| ) |
Definition at line 224 of file test_orientation_constraints.cpp.
◆ TEST_F() [6/7]
| TEST_F | ( | SphericalRobot | , |
| Test4 | |||
| ) |
Definition at line 272 of file test_orientation_constraints.cpp.
◆ TEST_F() [7/7]
| TEST_F | ( | SphericalRobot | , |
| Test5 | |||
| ) |
Definition at line 326 of file test_orientation_constraints.cpp.
◆ xyz_intrinsix_to_quat()
|
inline |
Helper function to create a quaternion from Euler angles.
Definition at line 129 of file test_orientation_constraints.cpp.
