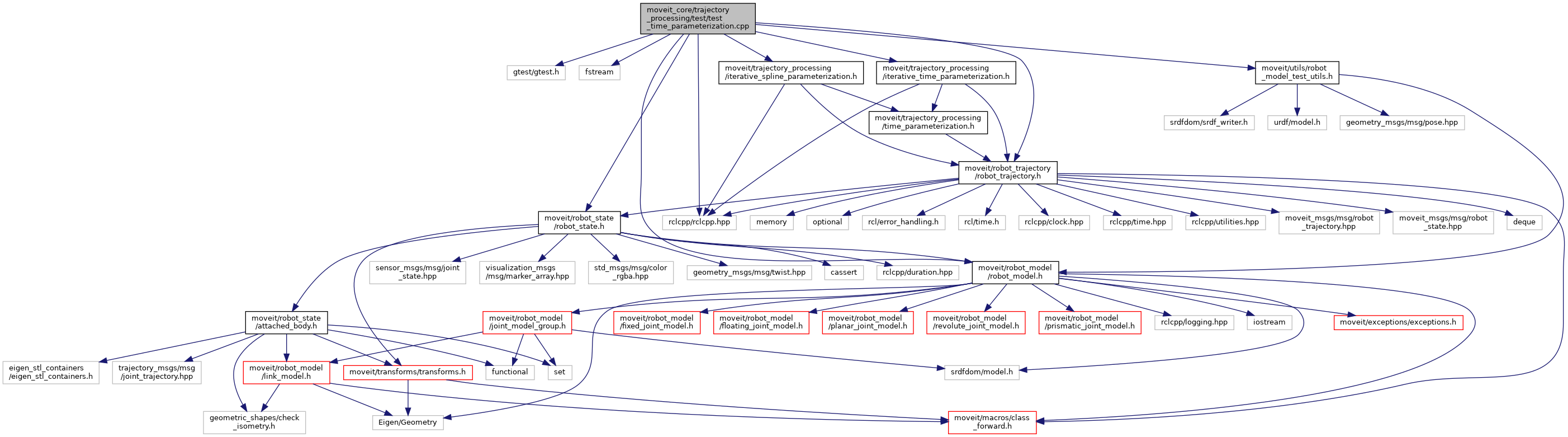
#include <gtest/gtest.h>#include <fstream>#include <moveit/robot_state/robot_state.h>#include <moveit/robot_model/robot_model.h>#include <moveit/robot_trajectory/robot_trajectory.h>#include <moveit/trajectory_processing/iterative_spline_parameterization.h>#include <moveit/trajectory_processing/iterative_time_parameterization.h>#include <moveit/utils/robot_model_test_utils.h>#include <rclcpp/rclcpp.hpp>
Include dependency graph for test_time_parameterization.cpp:
Go to the source code of this file.
Functions | |
| int | initRepeatedPointTrajectory (robot_trajectory::RobotTrajectory &trajectory) |
| int | initStraightTrajectory (robot_trajectory::RobotTrajectory &trajectory) |
| void | printTrajectory (robot_trajectory::RobotTrajectory &trajectory) |
| TEST (TestTimeParameterization, TestIterativeParabolic) | |
| TEST (TestTimeParameterization, TestIterativeSpline) | |
| TEST (TestTimeParameterization, TestIterativeSplineAddPoints) | |
| TEST (TestTimeParameterization, TestRepeatedPoint) | |
| int | main (int argc, char **argv) |
Variables | |
| moveit::core::RobotModelConstPtr | RMODEL = moveit::core::loadTestingRobotModel("pr2") |
| robot_trajectory::RobotTrajectory | TRAJECTORY (RMODEL, "right_arm") |
Function Documentation
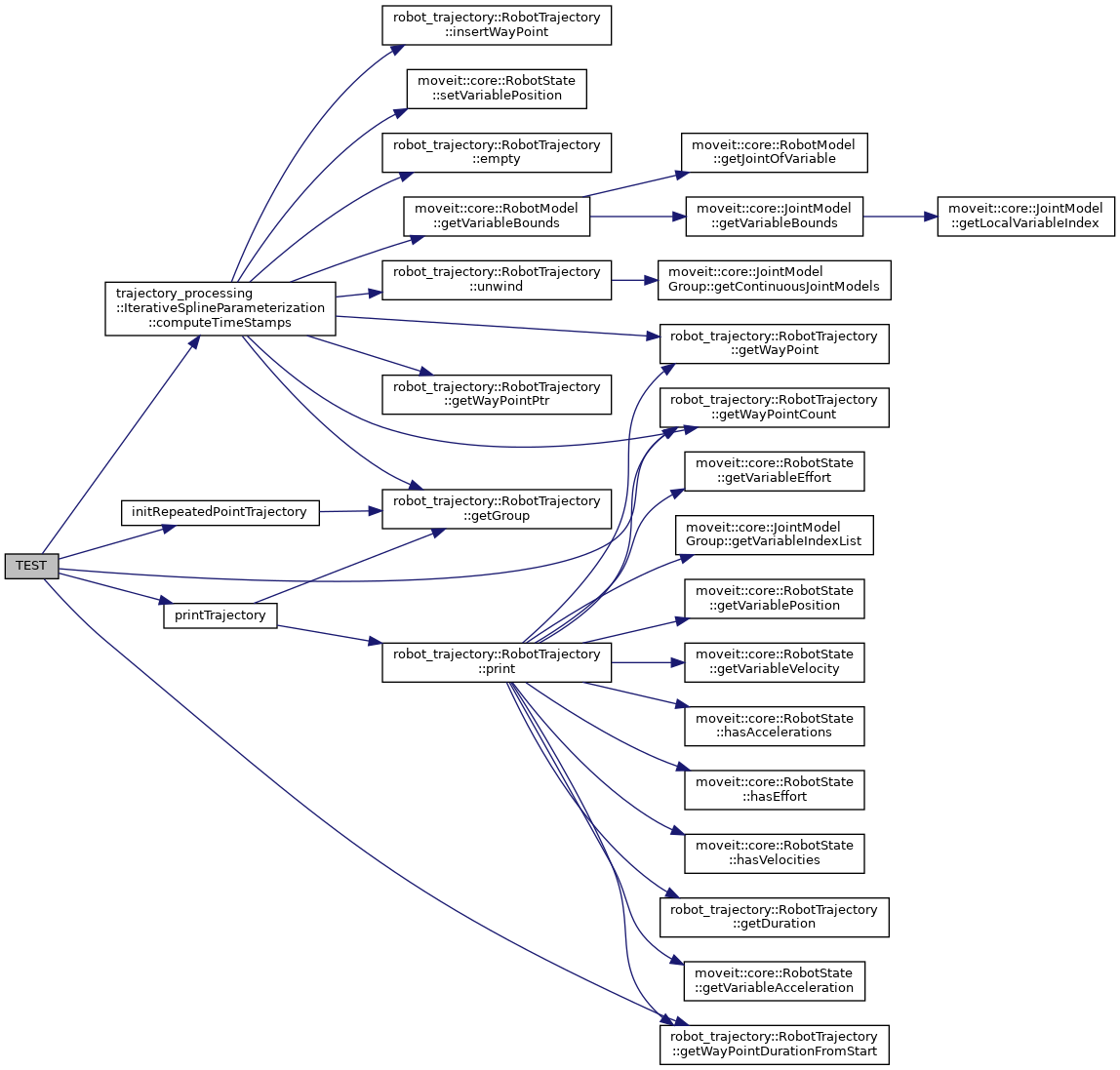
◆ initRepeatedPointTrajectory()
| int initRepeatedPointTrajectory | ( | robot_trajectory::RobotTrajectory & | trajectory | ) |
Definition at line 55 of file test_time_parameterization.cpp.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ initStraightTrajectory()
| int initStraightTrajectory | ( | robot_trajectory::RobotTrajectory & | trajectory | ) |
Definition at line 81 of file test_time_parameterization.cpp.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 167 of file test_time_parameterization.cpp.
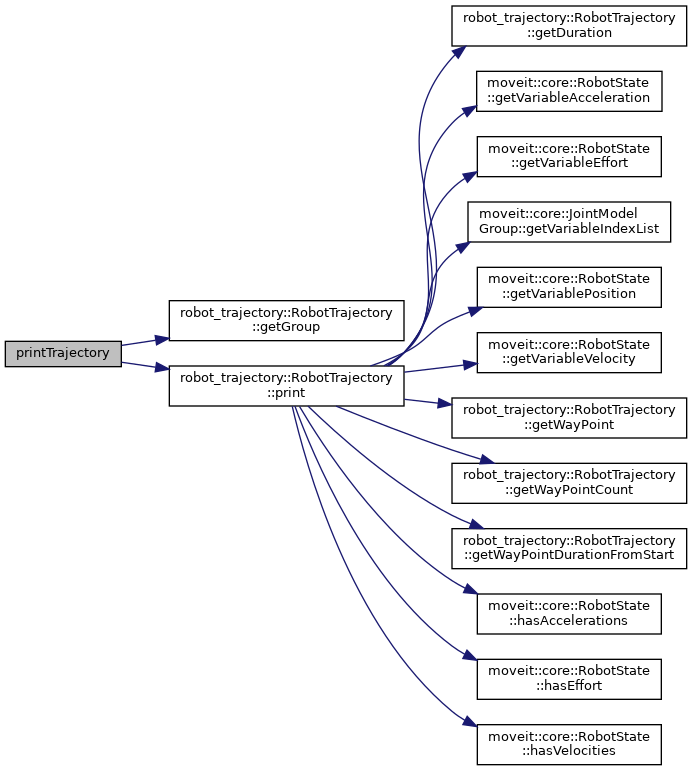
◆ printTrajectory()
| void printTrajectory | ( | robot_trajectory::RobotTrajectory & | trajectory | ) |
Definition at line 111 of file test_time_parameterization.cpp.
Here is the call graph for this function:
Here is the caller graph for this function:

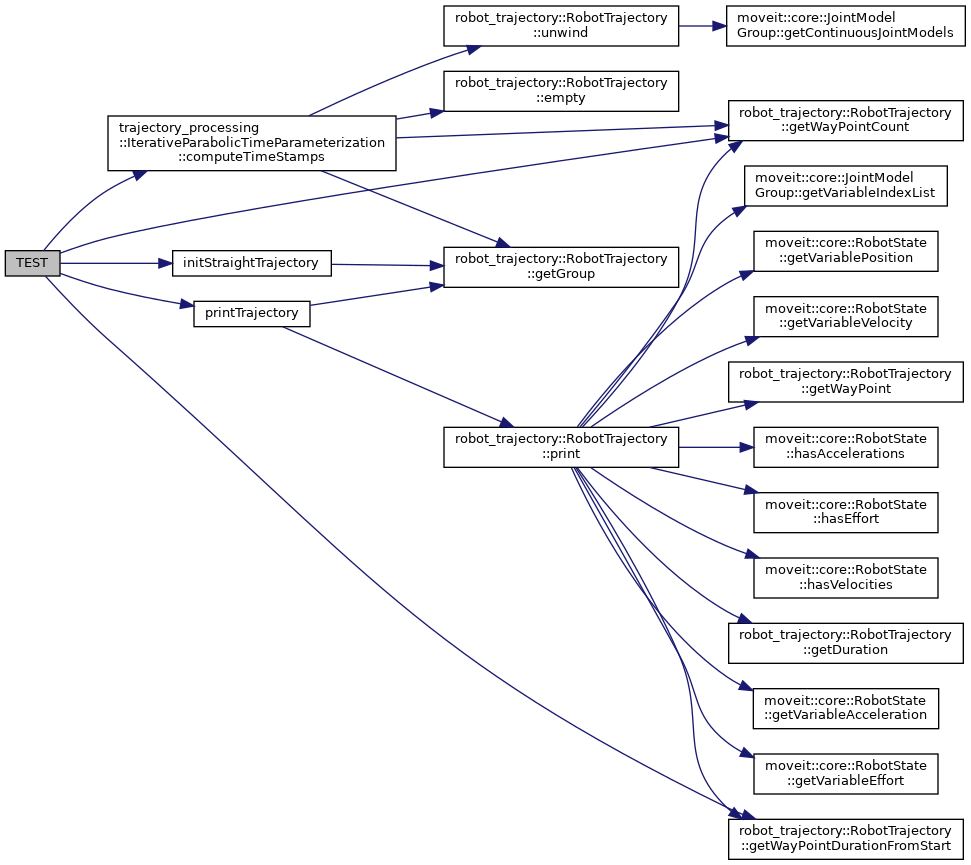
◆ TEST() [1/4]
| TEST | ( | TestTimeParameterization | , |
| TestIterativeParabolic | |||
| ) |
Definition at line 118 of file test_time_parameterization.cpp.
Here is the call graph for this function:
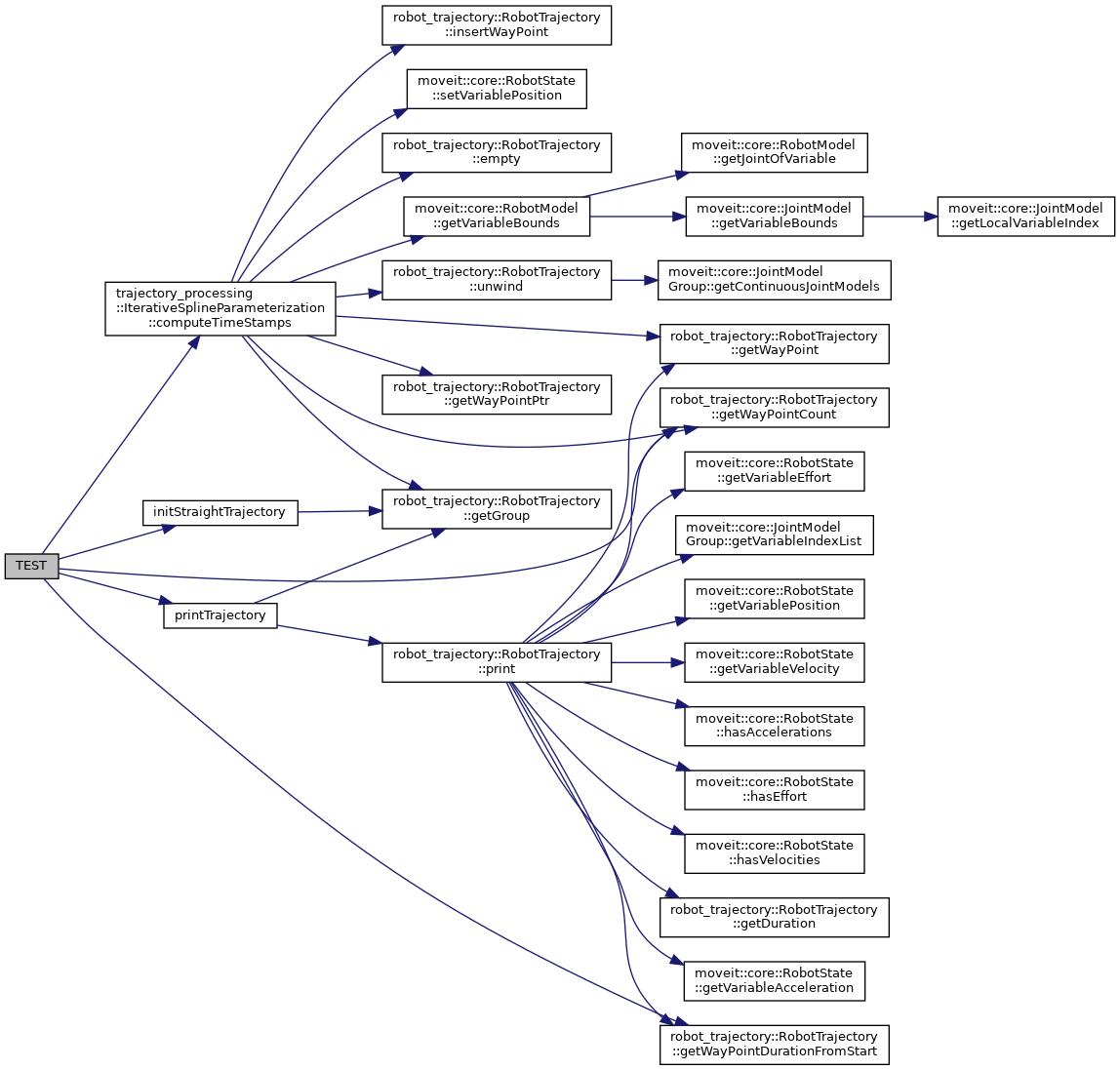
◆ TEST() [2/4]
| TEST | ( | TestTimeParameterization | , |
| TestIterativeSpline | |||
| ) |
Definition at line 132 of file test_time_parameterization.cpp.
Here is the call graph for this function:
◆ TEST() [3/4]
| TEST | ( | TestTimeParameterization | , |
| TestIterativeSplineAddPoints | |||
| ) |
Definition at line 144 of file test_time_parameterization.cpp.
Here is the call graph for this function:
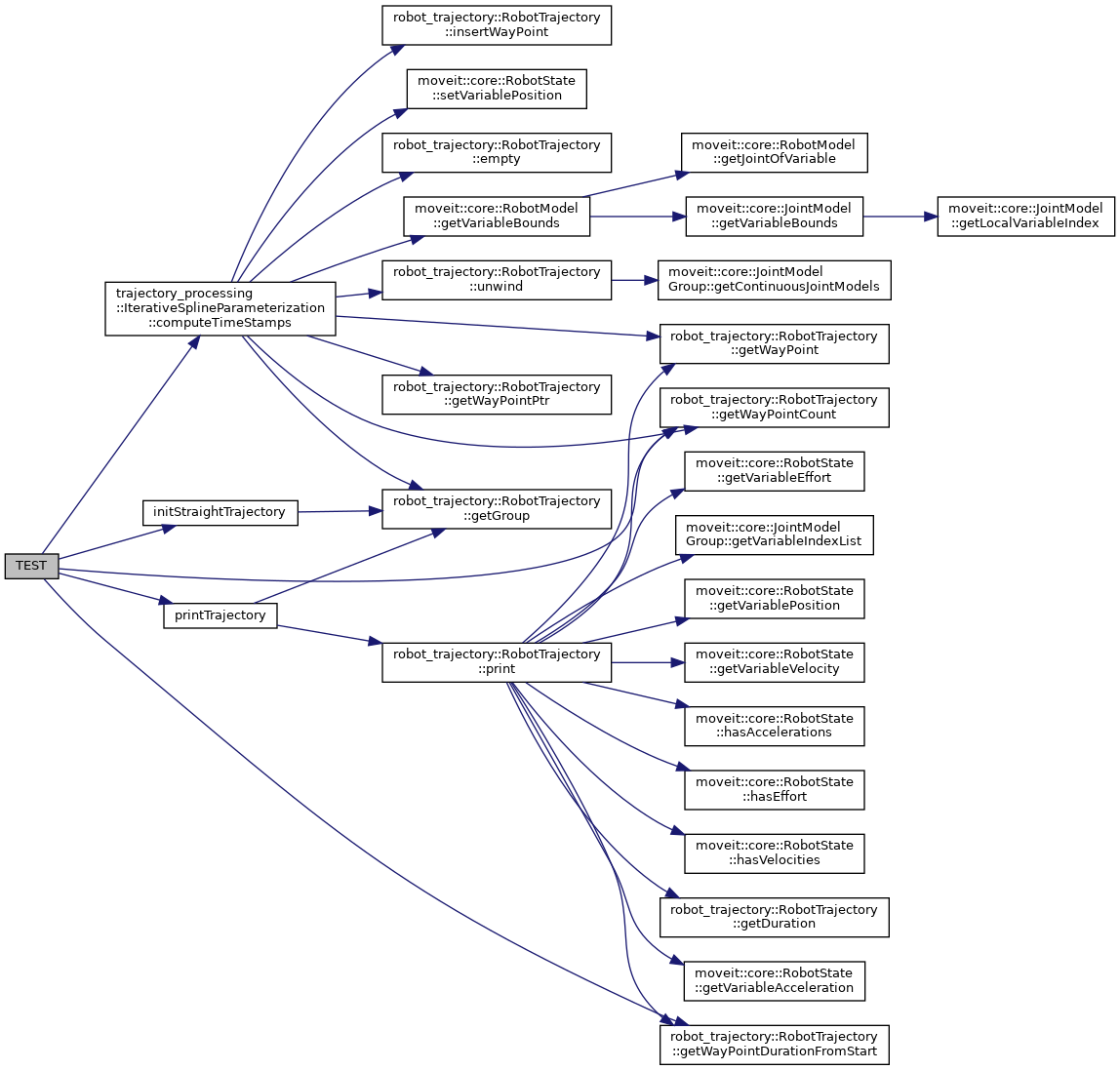
◆ TEST() [4/4]
| TEST | ( | TestTimeParameterization | , |
| TestRepeatedPoint | |||
| ) |
Definition at line 157 of file test_time_parameterization.cpp.
Here is the call graph for this function:
Variable Documentation
◆ RMODEL
| moveit::core::RobotModelConstPtr RMODEL = moveit::core::loadTestingRobotModel("pr2") |
Definition at line 51 of file test_time_parameterization.cpp.
◆ TRAJECTORY
| robot_trajectory::RobotTrajectory TRAJECTORY(RMODEL, "right_arm") | ( | RMODEL | , |
| "right_arm" | |||
| ) |