Core components of MoveIt. More...
Namespaces | |
| collision_detection | |
| kinematic_constraints | |
| planning_scene | |
| robot_model | |
| robot_state | |
| transforms | |
Classes | |
| class | AABB |
| Represents an axis-aligned bounding box. More... | |
| class | FixedJointModel |
| A fixed joint. More... | |
| class | FloatingJointModel |
| A floating joint. More... | |
| struct | VariableBounds |
| class | JointModel |
| A joint from the robot. Models the transform that this joint applies in the kinematic chain. A joint consists of multiple variables. In the simplest case, when the joint is a single DOF, there is only one variable and its name is the same as the joint's name. For multi-DOF joints, each variable has a local name (e.g., x, y) but the full variable name as seen from the outside of this class is a concatenation of the "joint name"/"local
name" (e.g., a joint named 'base' with local variables 'x' and 'y' will store its full variable names as 'base/x' and 'base/y'). Local names are never used to reference variables directly. More... | |
| class | JointModelGroup |
| class | LinkModel |
| A link from the robot. Contains the constant transform applied to the link and its geometry. More... | |
| class | PlanarJointModel |
| A planar joint. More... | |
| class | PrismaticJointModel |
| A prismatic joint. More... | |
| class | RevoluteJointModel |
| A revolute joint. More... | |
| class | RobotModel |
| Definition of a kinematic model. This class is not thread safe, however multiple instances can be created. More... | |
| class | AttachedBody |
| Object defining bodies that can be attached to robot links. More... | |
| struct | JumpThreshold |
| Struct for containing jump_threshold. More... | |
| struct | MaxEEFStep |
| Struct for containing max_step for computeCartesianPath. More... | |
| class | CartesianInterpolator |
| class | RobotState |
| Representation of a robot's state. This includes position, velocity, acceleration and effort. More... | |
| class | Transforms |
| Provides an implementation of a snapshot of a transform tree that can be easily queried for transforming different quantities. Transforms are maintained as a list of transforms to a particular frame. All stored transforms are considered fixed. More... | |
| class | MoveItErrorCode |
| a wrapper around moveit_msgs::MoveItErrorCodes to make it easier to return an error code message from a function More... | |
| class | RobotModelBuilder |
| Easily build different robot models for testing. Essentially a programmer-friendly light wrapper around URDF and SRDF. Best shown by an example: More... | |
Typedefs | |
| typedef std::map< std::string, size_t > | VariableIndexMap |
| Data type for holding mappings from variable names to their position in a state vector. More... | |
| using | VariableBoundsMap = std::map< std::string, VariableBounds > |
| Data type for holding mappings from variable names to their bounds. More... | |
| using | JointModelMap = std::map< std::string, JointModel * > |
| Map of names to instances for JointModel. More... | |
| using | JointModelMapConst = std::map< std::string, const JointModel * > |
| Map of names to const instances for JointModel. More... | |
| typedef std::function< kinematics::KinematicsBasePtr(const JointModelGroup *)> | SolverAllocatorFn |
| Function type that allocates a kinematics solver for a particular group. More... | |
| using | SolverAllocatorMapFn = std::map< const JointModelGroup *, SolverAllocatorFn > |
| Map from group instances to allocator functions & bijections. More... | |
| using | JointModelGroupMap = std::map< std::string, JointModelGroup * > |
| Map of names to instances for JointModelGroup. More... | |
| using | JointModelGroupMapConst = std::map< std::string, const JointModelGroup * > |
| Map of names to const instances for JointModelGroup. More... | |
| using | JointBoundsVector = std::vector< const JointModel::Bounds * > |
| typedef std::map< std::string, LinkModel * > | LinkModelMap |
| Map of names to instances for LinkModel. More... | |
| using | LinkModelMapConst = std::map< std::string, const LinkModel * > |
| Map of names to const instances for LinkModel. More... | |
| using | LinkTransformMap = std::map< const LinkModel *, Eigen::Isometry3d, std::less< const LinkModel * >, Eigen::aligned_allocator< std::pair< const LinkModel *const, Eigen::Isometry3d > > > |
| Map from link model instances to Eigen transforms. More... | |
| typedef std::function< void(AttachedBody *body, bool attached)> | AttachedBodyCallback |
| typedef std::function< bool(RobotState *robot_state, const JointModelGroup *joint_group, const double *joint_group_variable_values)> | GroupStateValidityCallbackFn |
| Signature for functions that can verify that if the group joint_group in robot_state is set to joint_group_variable_values the state is valid or not. Returns true if the state is valid. This call is allowed to modify robot_state (e.g., set joint_group_variable_values) More... | |
| using | FixedTransformsMap = std::map< std::string, Eigen::Isometry3d, std::less< std::string >, Eigen::aligned_allocator< std::pair< const std::string, Eigen::Isometry3d > > > |
| Map frame names to the transformation matrix that can transform objects from the frame name to the planning frame. More... | |
Functions | |
| MOVEIT_CLASS_FORWARD (JointModelGroup) | |
| MOVEIT_CLASS_FORWARD (RobotState) | |
| MOVEIT_CLASS_FORWARD (RobotModel) | |
| std::ostream & | operator<< (std::ostream &out, const VariableBounds &b) |
| Operator overload for printing variable bounds to a stream. More... | |
| void | computeTurnDriveTurnGeometry (const double *from, const double *to, const double min_translational_distance, double &dx, double &dy, double &initial_turn, double &drive_angle, double &final_turn) |
| Compute the geometry to turn toward the target point, drive straight and then turn to target orientation. More... | |
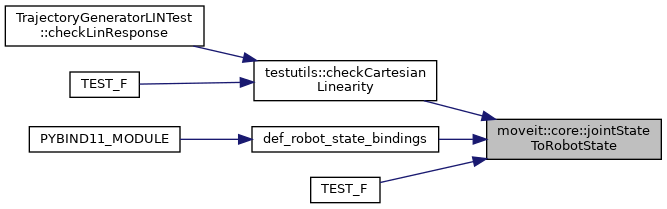
| bool | jointStateToRobotState (const sensor_msgs::msg::JointState &joint_state, RobotState &state) |
| Convert a joint state to a MoveIt robot state. More... | |
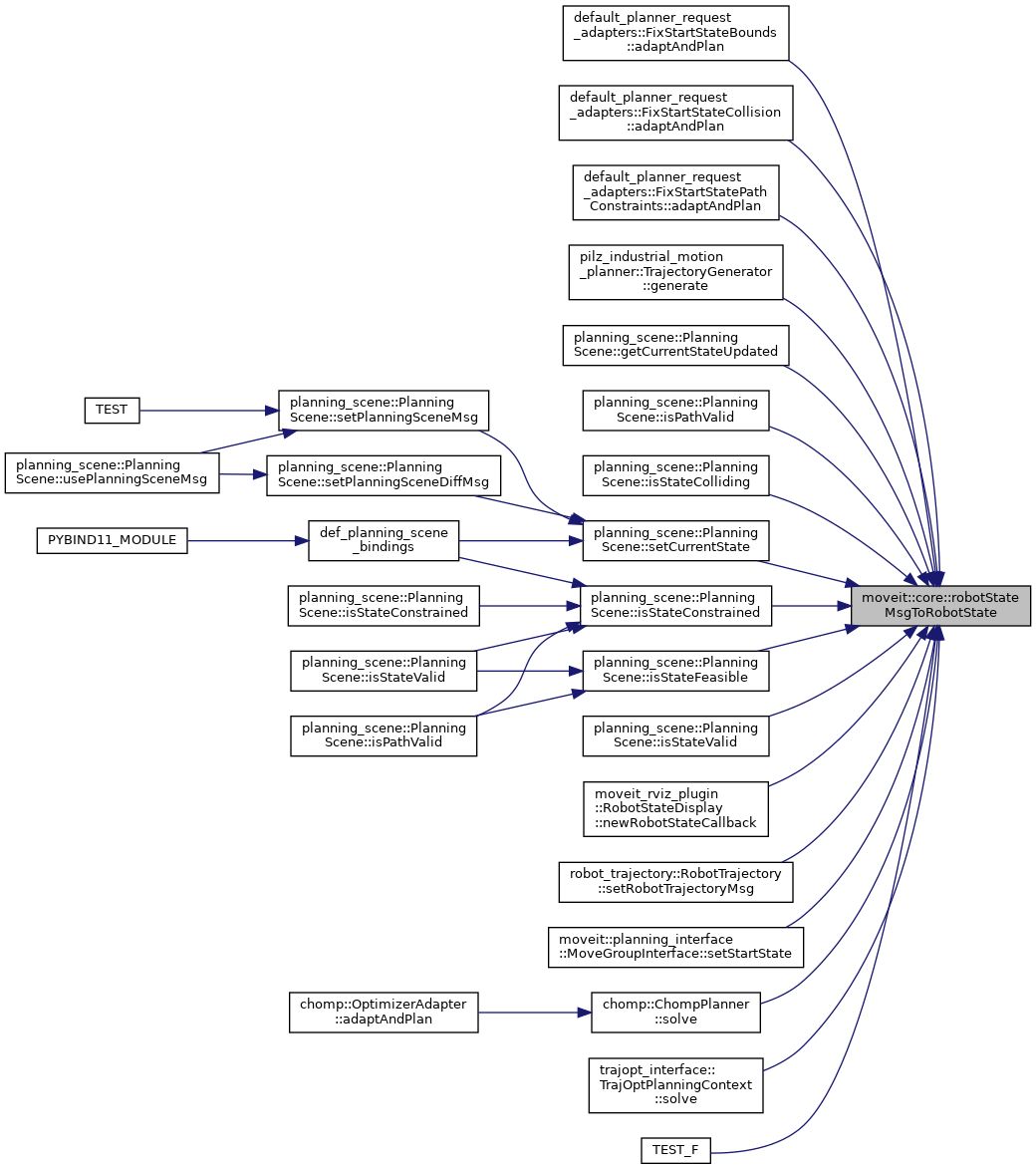
| bool | robotStateMsgToRobotState (const Transforms &tf, const moveit_msgs::msg::RobotState &robot_state, RobotState &state, bool copy_attached_bodies=true) |
| Convert a robot state msg (with accompanying extra transforms) to a MoveIt robot state. More... | |
| bool | robotStateMsgToRobotState (const moveit_msgs::msg::RobotState &robot_state, RobotState &state, bool copy_attached_bodies=true) |
| Convert a robot state msg (with accompanying extra transforms) to a MoveIt robot state. More... | |
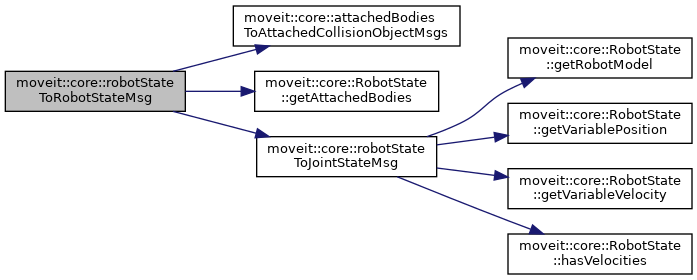
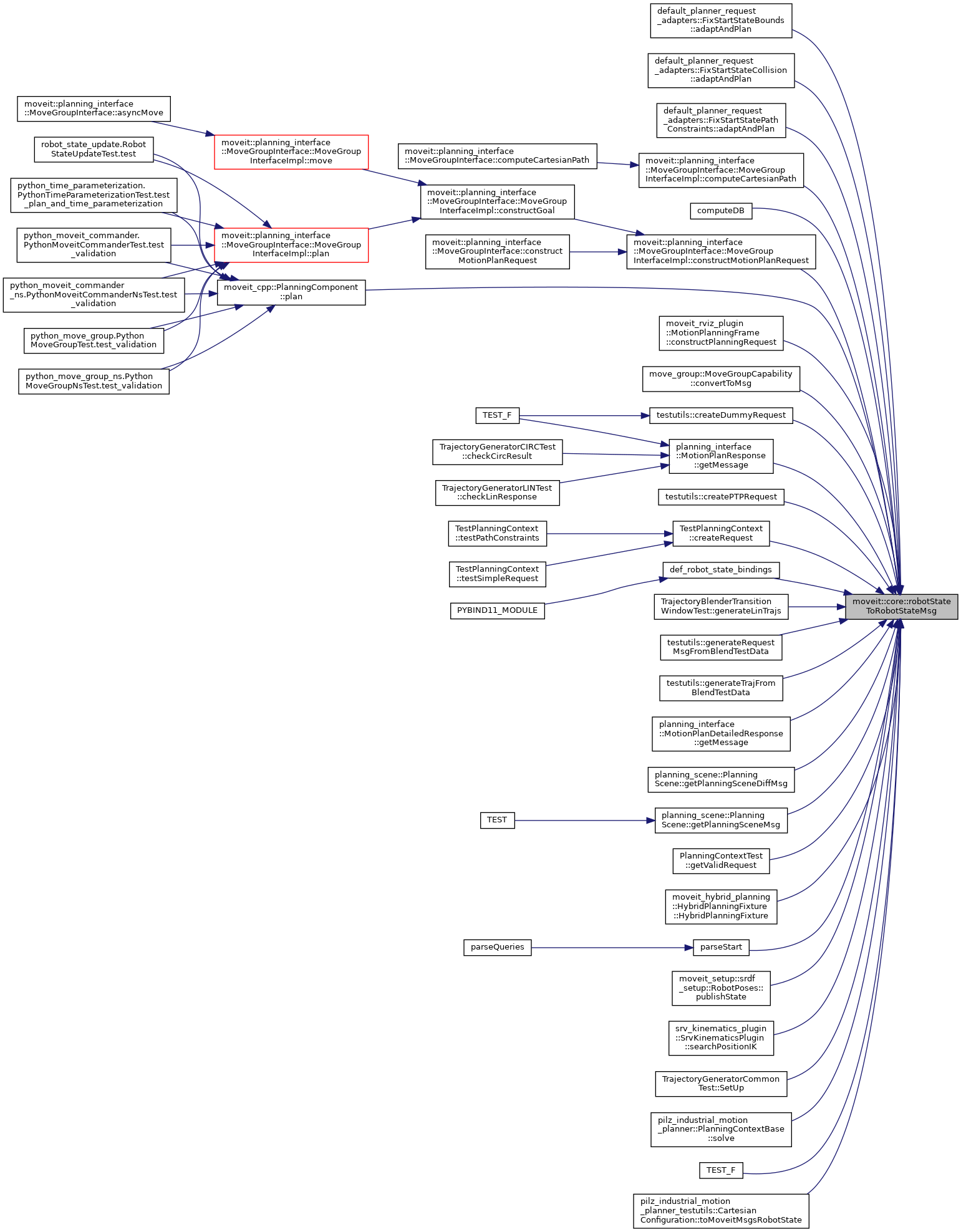
| void | robotStateToRobotStateMsg (const RobotState &state, moveit_msgs::msg::RobotState &robot_state, bool copy_attached_bodies=true) |
| Convert a MoveIt robot state to a robot state message. More... | |
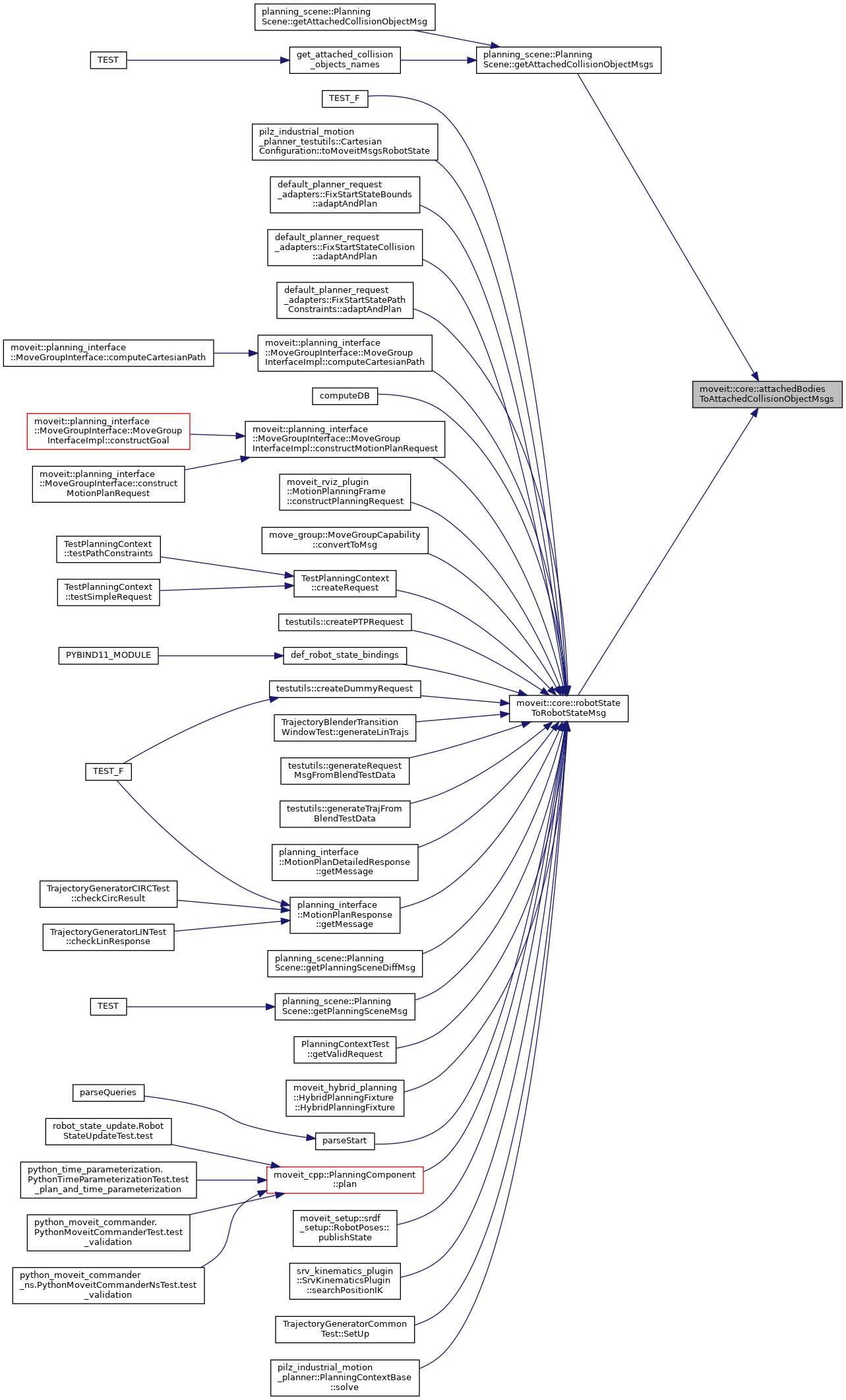
| void | attachedBodiesToAttachedCollisionObjectMsgs (const std::vector< const AttachedBody * > &attached_bodies, std::vector< moveit_msgs::msg::AttachedCollisionObject > &attached_collision_objs) |
| Convert AttachedBodies to AttachedCollisionObjects. More... | |
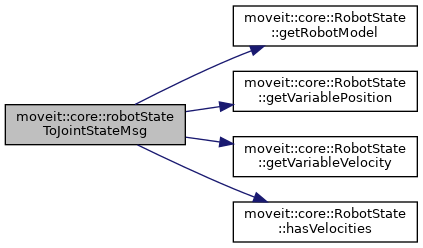
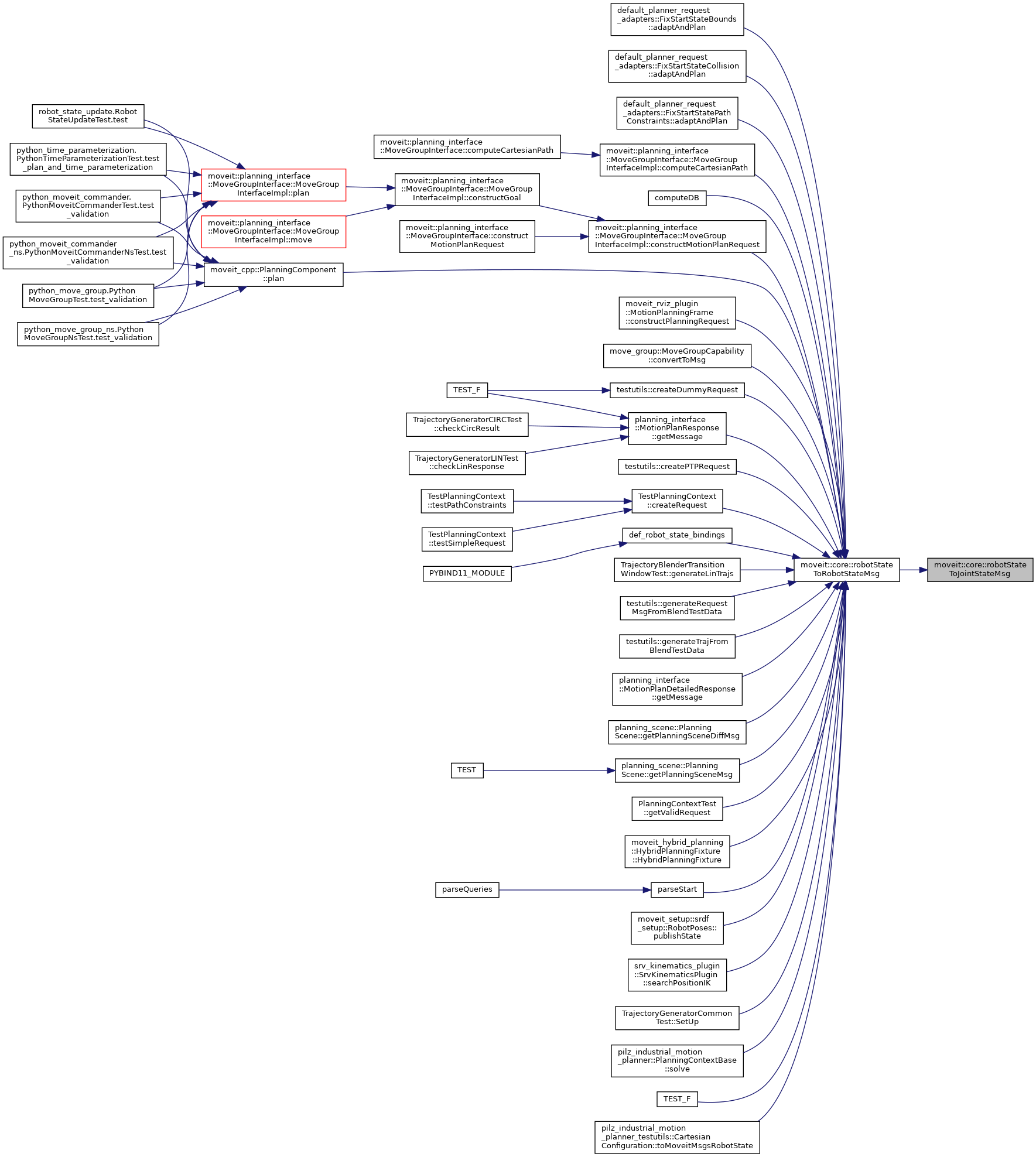
| void | robotStateToJointStateMsg (const RobotState &state, sensor_msgs::msg::JointState &joint_state) |
| Convert a MoveIt robot state to a joint state message. More... | |
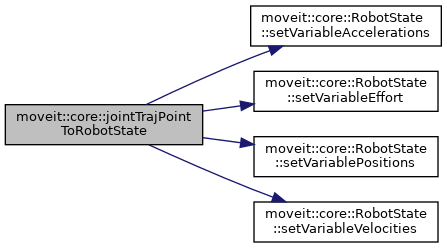
| bool | jointTrajPointToRobotState (const trajectory_msgs::msg::JointTrajectory &trajectory, std::size_t point_id, RobotState &state) |
| Convert a joint trajectory point to a MoveIt robot state. More... | |
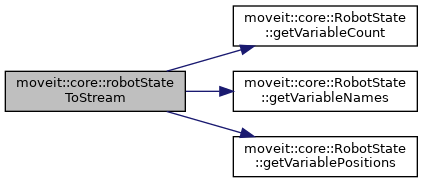
| void | robotStateToStream (const RobotState &state, std::ostream &out, bool include_header=true, const std::string &separator=",") |
| Convert a MoveIt robot state to common separated values (CSV) on a single line that is outputted to a stream e.g. for file saving. More... | |
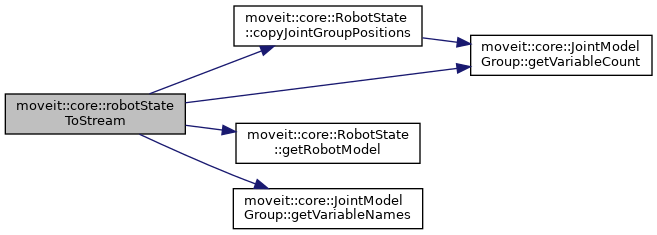
| void | robotStateToStream (const RobotState &state, std::ostream &out, const std::vector< std::string > &joint_groups_ordering, bool include_header=true, const std::string &separator=",") |
| Convert a MoveIt robot state to common separated values (CSV) on a single line that is outputted to a stream e.g. for file saving. This version can order by joint model groups. More... | |
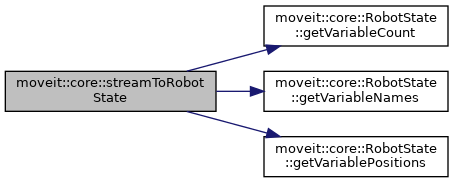
| void | streamToRobotState (RobotState &state, const std::string &line, const std::string &separator=",") |
| Convert a string of joint values from a file (CSV) or input source into a RobotState. More... | |
| std::ostream & | operator<< (std::ostream &out, const RobotState &s) |
| Operator overload for printing variable bounds to a stream. More... | |
| MOVEIT_CLASS_FORWARD (Transforms) | |
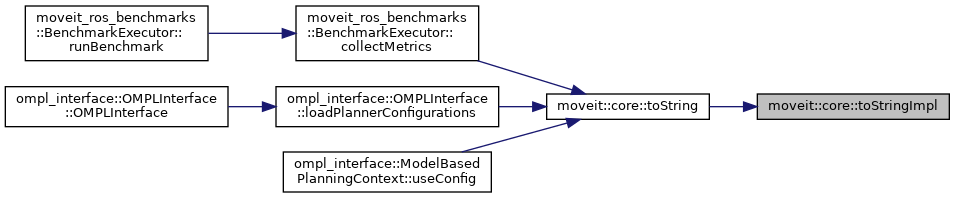
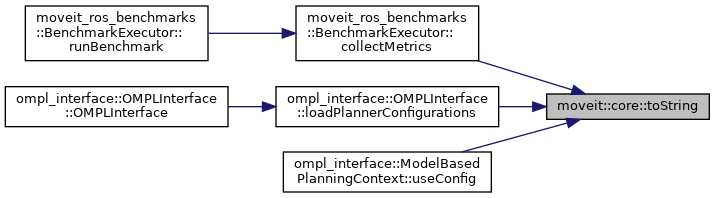
| std::string | toString (double d) |
| Convert a double to std::string using the classic C locale. More... | |
| std::string | toString (float f) |
| Convert a float to std::string using the classic C locale. More... | |
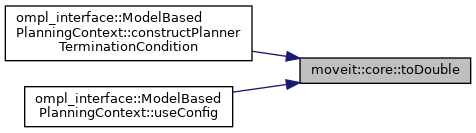
| double | toDouble (const std::string &s) |
| Converts a std::string to double using the classic C locale. More... | |
| float | toFloat (const std::string &s) |
| Converts a std::string to float using the classic C locale. More... | |
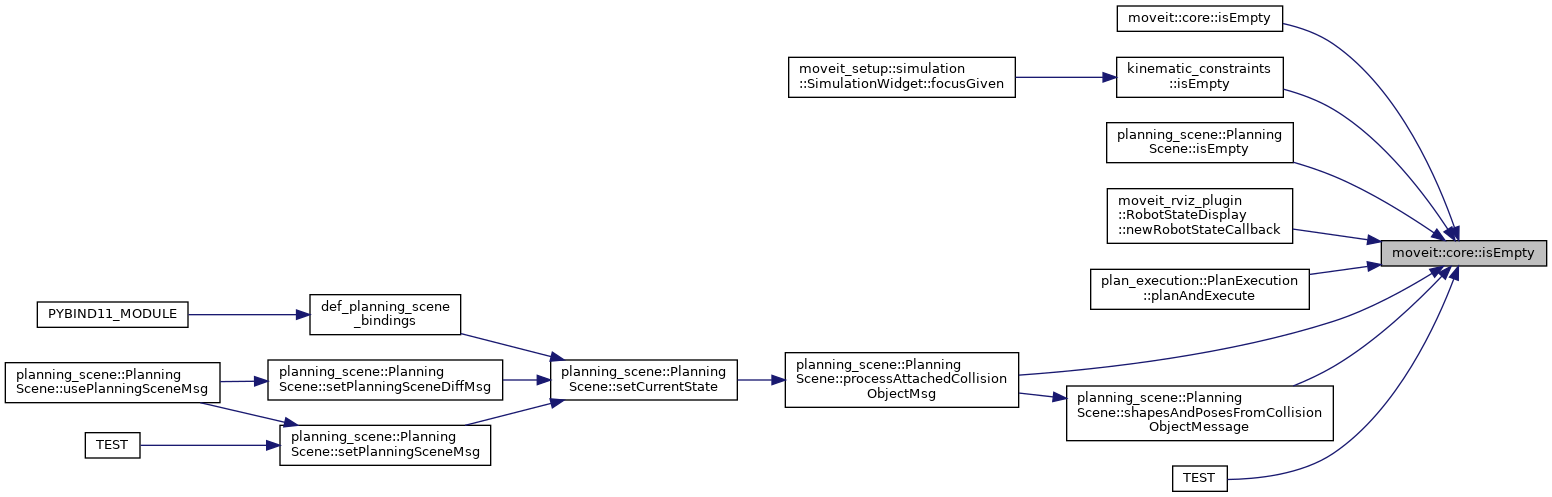
| bool | isEmpty (const moveit_msgs::msg::PlanningScene &msg) |
| Check if a message includes any information about a planning scene, or whether it is empty. More... | |
| bool | isEmpty (const moveit_msgs::msg::PlanningSceneWorld &msg) |
| Check if a message includes any information about a planning scene world, or whether it is empty. More... | |
| bool | isEmpty (const moveit_msgs::msg::RobotState &msg) |
| Check if a message includes any information about a robot state, or whether it is empty. More... | |
| bool | isEmpty (const moveit_msgs::msg::Constraints &msg) |
| Check if a message specifies constraints. More... | |
| bool | isEmpty (const geometry_msgs::msg::Quaternion &msg) |
| Check if the message contains any non-zero entries. More... | |
| bool | isEmpty (const geometry_msgs::msg::Pose &msg) |
| Check if the message contains any non-zero entries. More... | |
| std::string | error_code_to_string (MoveItErrorCode error_code) |
| Convenience function to translated error message into string. More... | |
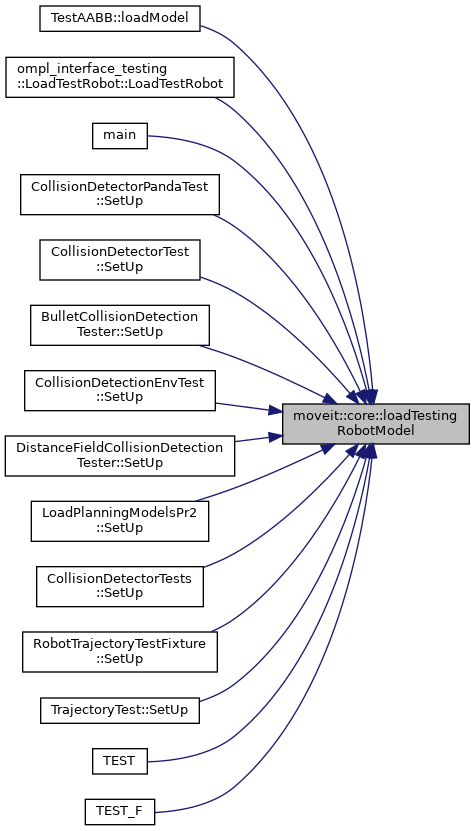
| moveit::core::RobotModelPtr | loadTestingRobotModel (const std::string &robot_name) |
| Loads a robot from moveit_resources. More... | |
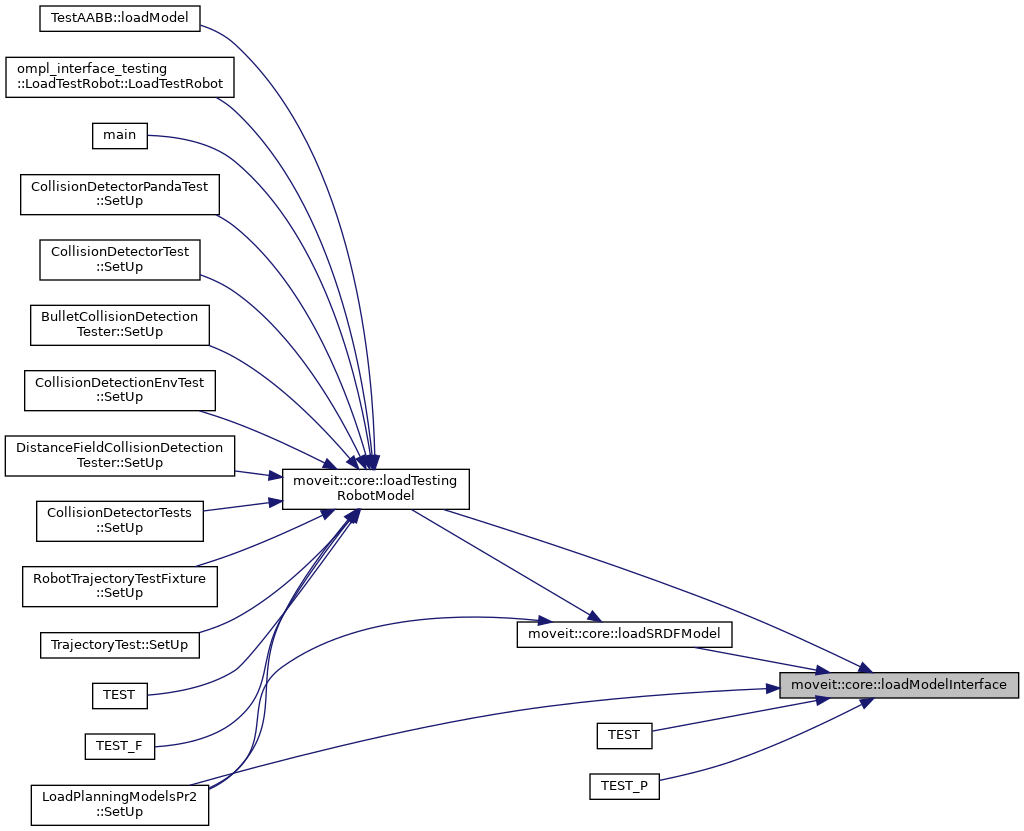
| urdf::ModelInterfaceSharedPtr | loadModelInterface (const std::string &robot_name) |
| Loads a URDF Model Interface from moveit_resources. More... | |
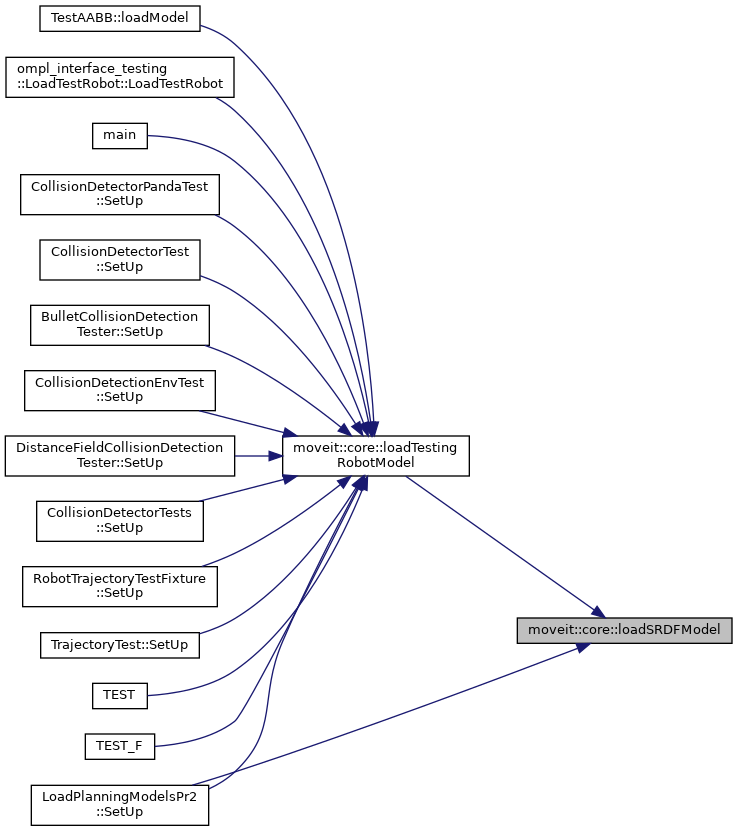
| srdf::ModelSharedPtr | loadSRDFModel (const std::string &robot_name) |
| Loads an SRDF Model from moveit_resources. More... | |
| template<class InType > | |
| std::string | toStringImpl (InType t) |
| template<class OutType > | |
| OutType | toRealImpl (const std::string &s) |
Detailed Description
Core components of MoveIt.
Typedef Documentation
◆ AttachedBodyCallback
| typedef std::function<void(AttachedBody* body, bool attached)> moveit::core::AttachedBodyCallback |
Definition at line 52 of file attached_body.h.
◆ FixedTransformsMap
| using moveit::core::FixedTransformsMap = typedef std::map<std::string, Eigen::Isometry3d, std::less<std::string>, Eigen::aligned_allocator<std::pair<const std::string, Eigen::Isometry3d> > > |
Map frame names to the transformation matrix that can transform objects from the frame name to the planning frame.
Definition at line 52 of file transforms.h.
◆ GroupStateValidityCallbackFn
| typedef std::function<bool(RobotState* robot_state, const JointModelGroup* joint_group, const double* joint_group_variable_values)> moveit::core::GroupStateValidityCallbackFn |
Signature for functions that can verify that if the group joint_group in robot_state is set to joint_group_variable_values the state is valid or not. Returns true if the state is valid. This call is allowed to modify robot_state (e.g., set joint_group_variable_values)
Definition at line 70 of file robot_state.h.
◆ JointBoundsVector
| using moveit::core::JointBoundsVector = typedef std::vector<const JointModel::Bounds*> |
Definition at line 67 of file joint_model_group.h.
◆ JointModelGroupMap
| using moveit::core::JointModelGroupMap = typedef std::map<std::string, JointModelGroup*> |
Map of names to instances for JointModelGroup.
Definition at line 62 of file joint_model_group.h.
◆ JointModelGroupMapConst
| using moveit::core::JointModelGroupMapConst = typedef std::map<std::string, const JointModelGroup*> |
Map of names to const instances for JointModelGroup.
Definition at line 65 of file joint_model_group.h.
◆ JointModelMap
| using moveit::core::JointModelMap = typedef std::map<std::string, JointModel*> |
Map of names to instances for JointModel.
Definition at line 99 of file joint_model.h.
◆ JointModelMapConst
| using moveit::core::JointModelMapConst = typedef std::map<std::string, const JointModel*> |
Map of names to const instances for JointModel.
Definition at line 102 of file joint_model.h.
◆ LinkModelMap
| typedef std::map<std::string, LinkModel*> moveit::core::LinkModelMap |
Map of names to instances for LinkModel.
Definition at line 61 of file link_model.h.
◆ LinkModelMapConst
| using moveit::core::LinkModelMapConst = typedef std::map<std::string, const LinkModel*> |
Map of names to const instances for LinkModel.
Definition at line 64 of file link_model.h.
◆ LinkTransformMap
| using moveit::core::LinkTransformMap = typedef std::map<const LinkModel*, Eigen::Isometry3d, std::less<const LinkModel*>, Eigen::aligned_allocator<std::pair<const LinkModel* const, Eigen::Isometry3d> > > |
Map from link model instances to Eigen transforms.
Definition at line 67 of file link_model.h.
◆ SolverAllocatorFn
| typedef std::function<kinematics::KinematicsBasePtr(const JointModelGroup*)> moveit::core::SolverAllocatorFn |
Function type that allocates a kinematics solver for a particular group.
Definition at line 56 of file joint_model_group.h.
◆ SolverAllocatorMapFn
| using moveit::core::SolverAllocatorMapFn = typedef std::map<const JointModelGroup*, SolverAllocatorFn> |
Map from group instances to allocator functions & bijections.
Definition at line 59 of file joint_model_group.h.
◆ VariableBoundsMap
| using moveit::core::VariableBoundsMap = typedef std::map<std::string, VariableBounds> |
Data type for holding mappings from variable names to their bounds.
Definition at line 96 of file joint_model.h.
◆ VariableIndexMap
| typedef std::map<std::string, size_t> moveit::core::VariableIndexMap |
Data type for holding mappings from variable names to their position in a state vector.
Definition at line 93 of file joint_model.h.
Function Documentation
◆ attachedBodiesToAttachedCollisionObjectMsgs()
| void moveit::core::attachedBodiesToAttachedCollisionObjectMsgs | ( | const std::vector< const AttachedBody * > & | attached_bodies, |
| std::vector< moveit_msgs::msg::AttachedCollisionObject > & | attached_collision_objs | ||
| ) |
Convert AttachedBodies to AttachedCollisionObjects.
- Parameters
-
attached_bodies The input MoveIt attached body objects attached_collision_objs The resultant AttachedCollisionObject messages
Definition at line 429 of file conversions.cpp.
◆ computeTurnDriveTurnGeometry()
| void moveit::core::computeTurnDriveTurnGeometry | ( | const double * | from, |
| const double * | to, | ||
| const double | min_translational_distance, | ||
| double & | dx, | ||
| double & | dy, | ||
| double & | initial_turn, | ||
| double & | drive_angle, | ||
| double & | final_turn | ||
| ) |
Compute the geometry to turn toward the target point, drive straight and then turn to target orientation.
- Parameters
-
[in] from A vector representing the initial position [x0, y0, theta0] [in] to A vector representing the target position [x1, y1, theta1] [in] min_translational_distance If the translational distance between fromandtois less than this value the motion will be pure rotation (meters)[out] dx x1 - x0 (meters) [out] dy y1 - y0 (meters) [out] initial_turn The initial turn in radians to face the target [out] drive_angle The orientation in radians that the robot will be driving straight at [out] final_turn The final turn in radians to the target orientation
Definition at line 146 of file planar_joint_model.cpp.

◆ error_code_to_string()
|
inline |
Convenience function to translated error message into string.
- Parameters
-
error_code Error code to be translated to a string
- Returns
- Error code string
Definition at line 77 of file moveit_error_code.h.
◆ isEmpty() [1/6]
| bool moveit::core::isEmpty | ( | const geometry_msgs::msg::Pose & | msg | ) |
Check if the message contains any non-zero entries.
Definition at line 77 of file message_checks.cpp.

◆ isEmpty() [2/6]
| bool moveit::core::isEmpty | ( | const geometry_msgs::msg::Quaternion & | msg | ) |
Check if the message contains any non-zero entries.
Definition at line 72 of file message_checks.cpp.
◆ isEmpty() [3/6]
| bool moveit::core::isEmpty | ( | const moveit_msgs::msg::Constraints & | msg | ) |
Check if a message specifies constraints.
Definition at line 66 of file message_checks.cpp.
◆ isEmpty() [4/6]
| bool moveit::core::isEmpty | ( | const moveit_msgs::msg::PlanningScene & | msg | ) |
Check if a message includes any information about a planning scene, or whether it is empty.
Definition at line 43 of file message_checks.cpp.
◆ isEmpty() [5/6]
| bool moveit::core::isEmpty | ( | const moveit_msgs::msg::PlanningSceneWorld & | msg | ) |
Check if a message includes any information about a planning scene world, or whether it is empty.
Definition at line 49 of file message_checks.cpp.
◆ isEmpty() [6/6]
| bool moveit::core::isEmpty | ( | const moveit_msgs::msg::RobotState & | msg | ) |
Check if a message includes any information about a robot state, or whether it is empty.
Definition at line 54 of file message_checks.cpp.
◆ jointStateToRobotState()
| bool moveit::core::jointStateToRobotState | ( | const sensor_msgs::msg::JointState & | joint_state, |
| RobotState & | state | ||
| ) |
Convert a joint state to a MoveIt robot state.
- Parameters
-
joint_state The input joint state to be converted state The resultant MoveIt robot state
- Returns
- True if successful, false if failed for any reason
Definition at line 391 of file conversions.cpp.

◆ jointTrajPointToRobotState()
| bool moveit::core::jointTrajPointToRobotState | ( | const trajectory_msgs::msg::JointTrajectory & | trajectory, |
| std::size_t | point_id, | ||
| RobotState & | state | ||
| ) |
Convert a joint trajectory point to a MoveIt robot state.
- Parameters
-
joint_trajectory The input msg point_id The index of the trajectory point in the joint trajectory. state The resultant MoveIt robot state
- Returns
- True if successful, false if failed for any reason
Definition at line 458 of file conversions.cpp.
◆ loadModelInterface()
| urdf::ModelInterfaceSharedPtr moveit::core::loadModelInterface | ( | const std::string & | robot_name | ) |
Loads a URDF Model Interface from moveit_resources.
- Parameters
-
[in] robot_name The name of the robot in moveit_resources to load. This should be the prefix to many of the robot packages. For example, "pr2", "panda", or "fanuc".
- Returns
- a ModelInterface constructed from robot_name's URDF.
Definition at line 60 of file robot_model_test_utils.cpp.

◆ loadSRDFModel()
| srdf::ModelSharedPtr moveit::core::loadSRDFModel | ( | const std::string & | robot_name | ) |
Loads an SRDF Model from moveit_resources.
- Parameters
-
[in] robot_name The name of the robot in moveit_resources to load. This should be the prefix to many of the robot packages. For example, "pr2", "panda", or "fanuc".
- Returns
- an SRDF Model constructed from robot_name's URDF and SRDF.
Definition at line 82 of file robot_model_test_utils.cpp.

◆ loadTestingRobotModel()
| moveit::core::RobotModelPtr moveit::core::loadTestingRobotModel | ( | const std::string & | robot_name | ) |
Loads a robot from moveit_resources.
- Parameters
-
[in] robot_name The name of the robot in moveit_resources to load. This should be the prefix to many of the robot packages. For example, "pr2", "panda", or "fanuc".
- Returns
- a RobotModel constructed from robot_name's URDF and SRDF.
Definition at line 52 of file robot_model_test_utils.cpp.

◆ MOVEIT_CLASS_FORWARD() [1/4]
| moveit::core::MOVEIT_CLASS_FORWARD | ( | JointModelGroup | ) |
◆ MOVEIT_CLASS_FORWARD() [2/4]
| moveit::core::MOVEIT_CLASS_FORWARD | ( | RobotModel | ) |
◆ MOVEIT_CLASS_FORWARD() [3/4]
| moveit::core::MOVEIT_CLASS_FORWARD | ( | RobotState | ) |
◆ MOVEIT_CLASS_FORWARD() [4/4]
| moveit::core::MOVEIT_CLASS_FORWARD | ( | Transforms | ) |
◆ operator<<() [1/2]
| std::ostream & moveit::core::operator<< | ( | std::ostream & | out, |
| const RobotState & | s | ||
| ) |
Operator overload for printing variable bounds to a stream.
Definition at line 2308 of file robot_state.cpp.

◆ operator<<() [2/2]
| std::ostream & moveit::core::operator<< | ( | std::ostream & | out, |
| const VariableBounds & | b | ||
| ) |
Operator overload for printing variable bounds to a stream.
Definition at line 229 of file joint_model.cpp.
◆ robotStateMsgToRobotState() [1/2]
| bool moveit::core::robotStateMsgToRobotState | ( | const moveit_msgs::msg::RobotState & | robot_state, |
| RobotState & | state, | ||
| bool | copy_attached_bodies = true |
||
| ) |
Convert a robot state msg (with accompanying extra transforms) to a MoveIt robot state.
- Parameters
-
robot_state The input robot state msg state The resultant MoveIt robot state copy_attached_bodies Flag to include attached objects in robot state copy
- Returns
- True if successful, false if failed for any reason
Definition at line 398 of file conversions.cpp.

◆ robotStateMsgToRobotState() [2/2]
| bool moveit::core::robotStateMsgToRobotState | ( | const Transforms & | tf, |
| const moveit_msgs::msg::RobotState & | robot_state, | ||
| RobotState & | state, | ||
| bool | copy_attached_bodies = true |
||
| ) |
Convert a robot state msg (with accompanying extra transforms) to a MoveIt robot state.
- Parameters
-
tf An instance of a transforms object robot_state The input robot state msg state The resultant MoveIt robot state copy_attached_bodies Flag to include attached objects in robot state copy
- Returns
- True if successful, false if failed for any reason
Definition at line 406 of file conversions.cpp.

◆ robotStateToJointStateMsg()
| void moveit::core::robotStateToJointStateMsg | ( | const RobotState & | state, |
| sensor_msgs::msg::JointState & | joint_state | ||
| ) |
Convert a MoveIt robot state to a joint state message.
- Parameters
-
state The input MoveIt robot state object robot_state The resultant JointState message
Definition at line 438 of file conversions.cpp.
◆ robotStateToRobotStateMsg()
| void moveit::core::robotStateToRobotStateMsg | ( | const RobotState & | state, |
| moveit_msgs::msg::RobotState & | robot_state, | ||
| bool | copy_attached_bodies = true |
||
| ) |
Convert a MoveIt robot state to a robot state message.
- Parameters
-
state The input MoveIt robot state object robot_state The resultant RobotState *message copy_attached_bodies Flag to include attached objects in robot state copy
Definition at line 414 of file conversions.cpp.
◆ robotStateToStream() [1/2]
| void moveit::core::robotStateToStream | ( | const RobotState & | state, |
| std::ostream & | out, | ||
| bool | include_header = true, |
||
| const std::string & | separator = "," |
||
| ) |
Convert a MoveIt robot state to common separated values (CSV) on a single line that is outputted to a stream e.g. for file saving.
- Parameters
-
state - The input MoveIt robot state object out - a file stream, or any other stream include_header - flag to prefix the output with a line of joint names. separator - allows to override the comma separator with any symbol, such as a white space
Definition at line 483 of file conversions.cpp.
◆ robotStateToStream() [2/2]
| void moveit::core::robotStateToStream | ( | const RobotState & | state, |
| std::ostream & | out, | ||
| const std::vector< std::string > & | joint_groups_ordering, | ||
| bool | include_header = true, |
||
| const std::string & | separator = "," |
||
| ) |
Convert a MoveIt robot state to common separated values (CSV) on a single line that is outputted to a stream e.g. for file saving. This version can order by joint model groups.
- Parameters
-
state - The input MoveIt robot state object out - a file stream, or any other stream joint_group_ordering - output joints based on ordering of joint groups include_header - flag to prefix the output with a line of joint names. separator - allows to override the comma separator with any symbol, such as a white space
Definition at line 511 of file conversions.cpp.
◆ streamToRobotState()
| void moveit::core::streamToRobotState | ( | RobotState & | state, |
| const std::string & | line, | ||
| const std::string & | separator = "," |
||
| ) |
Convert a string of joint values from a file (CSV) or input source into a RobotState.
- Parameters
-
state - the output MoveIt robot state object line - the input string of joint values separator - allows to override the comma separator with any symbol, such as a white space
- Returns
- true on success
Definition at line 548 of file conversions.cpp.
◆ toDouble()
| double moveit::core::toDouble | ( | const std::string & | s | ) |
Converts a std::string to double using the classic C locale.
- Exceptions
-
std::runtime_exception if not a valid number
Definition at line 80 of file lexical_casts.cpp.
◆ toFloat()
| float moveit::core::toFloat | ( | const std::string & | s | ) |
Converts a std::string to float using the classic C locale.
- Exceptions
-
std::runtime_exception if not a valid number
Definition at line 85 of file lexical_casts.cpp.
◆ toRealImpl()
| OutType moveit::core::toRealImpl | ( | const std::string & | s | ) |
Definition at line 66 of file lexical_casts.cpp.
◆ toString() [1/2]
| std::string moveit::core::toString | ( | double | d | ) |
Convert a double to std::string using the classic C locale.
Definition at line 55 of file lexical_casts.cpp.

◆ toString() [2/2]
| std::string moveit::core::toString | ( | float | f | ) |
Convert a float to std::string using the classic C locale.
Definition at line 60 of file lexical_casts.cpp.

◆ toStringImpl()
| std::string moveit::core::toStringImpl | ( | InType | t | ) |