#include <memory>#include <gtest/gtest.h>#include <moveit/kinematic_constraints/utils.h>#include <moveit/robot_model/robot_model.h>#include <moveit/robot_model_loader/robot_model_loader.h>#include <moveit/robot_state/conversions.h>#include <tf2_eigen/tf2_eigen.hpp>#include <tf2_geometry_msgs/tf2_geometry_msgs.hpp>#include <pilz_industrial_motion_planner/joint_limits_aggregator.h>#include <pilz_industrial_motion_planner/trajectory_generator_circ.h>#include <pilz_industrial_motion_planner_testutils/command_types_typedef.h>#include <pilz_industrial_motion_planner_testutils/xml_testdata_loader.h>#include "test_utils.h"#include <rclcpp/rclcpp.hpp>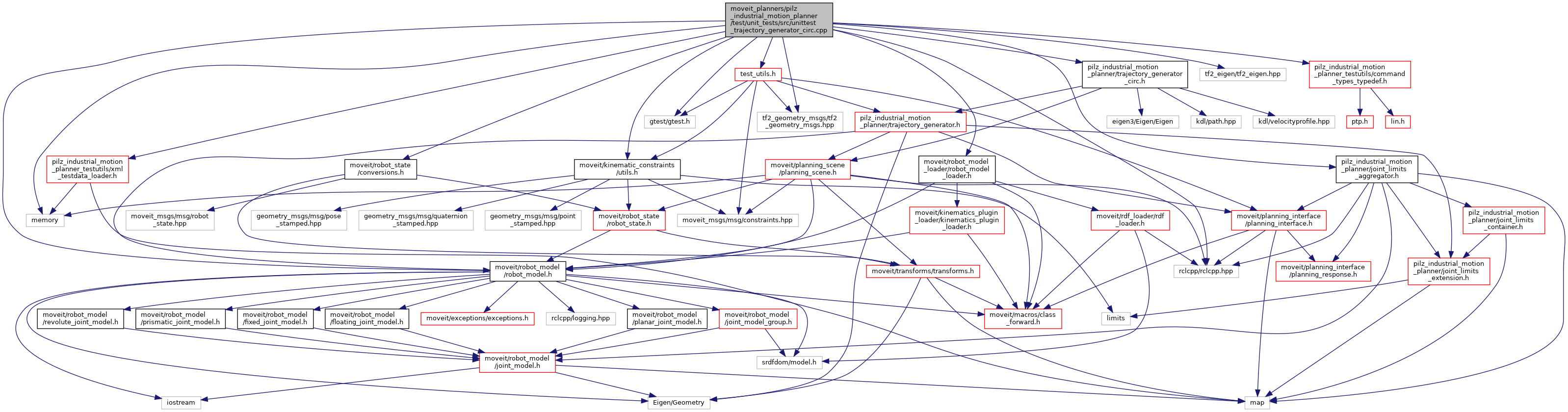
Go to the source code of this file.
Classes | |
| class | TrajectoryGeneratorCIRCTest |
Functions | |
| TEST_F (TrajectoryGeneratorCIRCTest, TestExceptionErrorCodeMapping) | |
| Checks that each derived MoveItErrorCodeException contains the correct error code. More... | |
| TEST_F (TrajectoryGeneratorCIRCTest, noLimits) | |
| Construct a TrajectoryGeneratorCirc with no limits given. More... | |
| TEST_F (TrajectoryGeneratorCIRCTest, nonZeroStartVelocity) | |
| test invalid motion plan request with non zero start velocity More... | |
| TEST_F (TrajectoryGeneratorCIRCTest, ValidCommand) | |
| TEST_F (TrajectoryGeneratorCIRCTest, velScaleToHigh) | |
| Generate invalid circ with to high vel scaling. More... | |
| TEST_F (TrajectoryGeneratorCIRCTest, accScaleToHigh) | |
| Generate invalid circ with to high acc scaling. More... | |
| TEST_F (TrajectoryGeneratorCIRCTest, samePointsWithCenter) | |
| Use three points (with center) with a really small distance between to trigger a internal throw from KDL. More... | |
| TEST_F (TrajectoryGeneratorCIRCTest, samePointsWithInterim) | |
| Use three points (with interim) with a really small distance between. More... | |
| TEST_F (TrajectoryGeneratorCIRCTest, emptyAux) | |
| test invalid motion plan request with no aux point defined More... | |
| TEST_F (TrajectoryGeneratorCIRCTest, invalidAuxName) | |
| test invalid motion plan request with no aux name defined More... | |
| TEST_F (TrajectoryGeneratorCIRCTest, invalidAuxLinkName) | |
| test invalid motion plan request with invalid link name in the auxiliary point More... | |
| TEST_F (TrajectoryGeneratorCIRCTest, invalidCenter) | |
| test the circ planner with invalid center point More... | |
| TEST_F (TrajectoryGeneratorCIRCTest, colinearCenter) | |
| test the circ planner with colinear start/goal/center position More... | |
| TEST_F (TrajectoryGeneratorCIRCTest, colinearInterim) | |
| test the circ planner with colinear start/goal/interim position More... | |
| TEST_F (TrajectoryGeneratorCIRCTest, colinearCenterDueToInterim) | |
| test the circ planner with half circle with interim point More... | |
| TEST_F (TrajectoryGeneratorCIRCTest, colinearCenterAndInterim) | |
| test the circ planner with colinear start/center/interim positions More... | |
| TEST_F (TrajectoryGeneratorCIRCTest, interimLarger180Degree) | |
| test the circ planner with a circ path where the angle between goal and interim is larger than 180 degree More... | |
| TEST_F (TrajectoryGeneratorCIRCTest, centerPointJointGoal) | |
| test the circ planner with center point and joint goal More... | |
| TEST_F (TrajectoryGeneratorCIRCTest, InvalidAdditionalPrimitivePose) | |
| A valid circ request contains a helping point (interim or center), in this test a additional point is defined as an invalid test case. More... | |
| TEST_F (TrajectoryGeneratorCIRCTest, InvalidExtraJointConstraint) | |
| Joint Goals are expected to match the start state in number and joint_names Here an additional joint constraints is "falsely" defined to check for the error. More... | |
| TEST_F (TrajectoryGeneratorCIRCTest, CenterPointPoseGoal) | |
| test the circ planner with center point and pose goal More... | |
| TEST_F (TrajectoryGeneratorCIRCTest, CenterPointPoseGoalFrameIdPositionConstraints) | |
| Set a frame id only on the position constrainst. More... | |
| TEST_F (TrajectoryGeneratorCIRCTest, CenterPointPoseGoalFrameIdOrientationConstraints) | |
| Set a frame id only on the orientation constrainst. More... | |
| TEST_F (TrajectoryGeneratorCIRCTest, CenterPointPoseGoalFrameIdBothConstraints) | |
| Set a frame_id on both position and orientation constraints. More... | |
| TEST_F (TrajectoryGeneratorCIRCTest, InterimPointJointGoal) | |
| test the circ planner with interim point with joint goal More... | |
| TEST_F (TrajectoryGeneratorCIRCTest, InterimPointJointGoalStartVelNearZero) | |
| test the circ planner with interim point with joint goal and a close to zero velocity of the start state More... | |
| TEST_F (TrajectoryGeneratorCIRCTest, InterimPointPoseGoal) | |
| test the circ planner with interim point with pose goal More... | |
| int | main (int argc, char **argv) |
Function Documentation
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 746 of file unittest_trajectory_generator_circ.cpp.
◆ TEST_F() [1/27]
| TEST_F | ( | TrajectoryGeneratorCIRCTest | , |
| accScaleToHigh | |||
| ) |
Generate invalid circ with to high acc scaling.
Definition at line 322 of file unittest_trajectory_generator_circ.cpp.
◆ TEST_F() [2/27]
| TEST_F | ( | TrajectoryGeneratorCIRCTest | , |
| centerPointJointGoal | |||
| ) |
test the circ planner with center point and joint goal
Definition at line 570 of file unittest_trajectory_generator_circ.cpp.
◆ TEST_F() [3/27]
| TEST_F | ( | TrajectoryGeneratorCIRCTest | , |
| CenterPointPoseGoal | |||
| ) |
test the circ planner with center point and pose goal
Definition at line 632 of file unittest_trajectory_generator_circ.cpp.
◆ TEST_F() [4/27]
| TEST_F | ( | TrajectoryGeneratorCIRCTest | , |
| CenterPointPoseGoalFrameIdBothConstraints | |||
| ) |
Set a frame_id on both position and orientation constraints.
Definition at line 680 of file unittest_trajectory_generator_circ.cpp.
◆ TEST_F() [5/27]
| TEST_F | ( | TrajectoryGeneratorCIRCTest | , |
| CenterPointPoseGoalFrameIdOrientationConstraints | |||
| ) |
Set a frame id only on the orientation constrainst.
Definition at line 664 of file unittest_trajectory_generator_circ.cpp.
◆ TEST_F() [6/27]
| TEST_F | ( | TrajectoryGeneratorCIRCTest | , |
| CenterPointPoseGoalFrameIdPositionConstraints | |||
| ) |
Set a frame id only on the position constrainst.
Definition at line 647 of file unittest_trajectory_generator_circ.cpp.
◆ TEST_F() [7/27]
| TEST_F | ( | TrajectoryGeneratorCIRCTest | , |
| colinearCenter | |||
| ) |
test the circ planner with colinear start/goal/center position
Expected: Planning should fail since the path is not uniquely defined.
Definition at line 445 of file unittest_trajectory_generator_circ.cpp.
◆ TEST_F() [8/27]
| TEST_F | ( | TrajectoryGeneratorCIRCTest | , |
| colinearCenterAndInterim | |||
| ) |
test the circ planner with colinear start/center/interim positions
The request contains start/interim/goal such that start, center (not explicitly given) and interim are colinear. In case the interim is used as auxiliary point for KDL::Path_Circle this should fail.
Expected: Planning should successfully return.
Definition at line 509 of file unittest_trajectory_generator_circ.cpp.
◆ TEST_F() [9/27]
| TEST_F | ( | TrajectoryGeneratorCIRCTest | , |
| colinearCenterDueToInterim | |||
| ) |
test the circ planner with half circle with interim point
The request contains start/interim/goal such that start, center (not explicitly given) and goal are colinear
Expected: Planning should successfully return.
Definition at line 489 of file unittest_trajectory_generator_circ.cpp.
◆ TEST_F() [10/27]
| TEST_F | ( | TrajectoryGeneratorCIRCTest | , |
| colinearInterim | |||
| ) |
test the circ planner with colinear start/goal/interim position
Expected: Planning should fail. These positions do not even represent a circle.
Definition at line 466 of file unittest_trajectory_generator_circ.cpp.
◆ TEST_F() [11/27]
| TEST_F | ( | TrajectoryGeneratorCIRCTest | , |
| emptyAux | |||
| ) |
test invalid motion plan request with no aux point defined
Definition at line 380 of file unittest_trajectory_generator_circ.cpp.
◆ TEST_F() [12/27]
| TEST_F | ( | TrajectoryGeneratorCIRCTest | , |
| interimLarger180Degree | |||
| ) |
test the circ planner with a circ path where the angle between goal and interim is larger than 180 degree
The request contains start/interim/goal such that 180 degree < interim angle < goal angle.
Expected: Planning should successfully return.
Definition at line 542 of file unittest_trajectory_generator_circ.cpp.
◆ TEST_F() [13/27]
| TEST_F | ( | TrajectoryGeneratorCIRCTest | , |
| InterimPointJointGoal | |||
| ) |
test the circ planner with interim point with joint goal
Definition at line 699 of file unittest_trajectory_generator_circ.cpp.
◆ TEST_F() [14/27]
| TEST_F | ( | TrajectoryGeneratorCIRCTest | , |
| InterimPointJointGoalStartVelNearZero | |||
| ) |
test the circ planner with interim point with joint goal and a close to zero velocity of the start state
The generator is expected to be robust against a velocity being almost zero.
Definition at line 717 of file unittest_trajectory_generator_circ.cpp.
◆ TEST_F() [15/27]
| TEST_F | ( | TrajectoryGeneratorCIRCTest | , |
| InterimPointPoseGoal | |||
| ) |
test the circ planner with interim point with pose goal
Definition at line 735 of file unittest_trajectory_generator_circ.cpp.
◆ TEST_F() [16/27]
| TEST_F | ( | TrajectoryGeneratorCIRCTest | , |
| InvalidAdditionalPrimitivePose | |||
| ) |
A valid circ request contains a helping point (interim or center), in this test a additional point is defined as an invalid test case.
Definition at line 586 of file unittest_trajectory_generator_circ.cpp.
◆ TEST_F() [17/27]
| TEST_F | ( | TrajectoryGeneratorCIRCTest | , |
| invalidAuxLinkName | |||
| ) |
test invalid motion plan request with invalid link name in the auxiliary point
Definition at line 413 of file unittest_trajectory_generator_circ.cpp.
◆ TEST_F() [18/27]
| TEST_F | ( | TrajectoryGeneratorCIRCTest | , |
| invalidAuxName | |||
| ) |
test invalid motion plan request with no aux name defined
Definition at line 396 of file unittest_trajectory_generator_circ.cpp.
◆ TEST_F() [19/27]
| TEST_F | ( | TrajectoryGeneratorCIRCTest | , |
| invalidCenter | |||
| ) |
test the circ planner with invalid center point
Definition at line 429 of file unittest_trajectory_generator_circ.cpp.
◆ TEST_F() [20/27]
| TEST_F | ( | TrajectoryGeneratorCIRCTest | , |
| InvalidExtraJointConstraint | |||
| ) |
Joint Goals are expected to match the start state in number and joint_names Here an additional joint constraints is "falsely" defined to check for the error.
Definition at line 613 of file unittest_trajectory_generator_circ.cpp.
◆ TEST_F() [21/27]
| TEST_F | ( | TrajectoryGeneratorCIRCTest | , |
| noLimits | |||
| ) |
Construct a TrajectoryGeneratorCirc with no limits given.
Definition at line 275 of file unittest_trajectory_generator_circ.cpp.
◆ TEST_F() [22/27]
| TEST_F | ( | TrajectoryGeneratorCIRCTest | , |
| nonZeroStartVelocity | |||
| ) |
test invalid motion plan request with non zero start velocity
Definition at line 285 of file unittest_trajectory_generator_circ.cpp.
◆ TEST_F() [23/27]
| TEST_F | ( | TrajectoryGeneratorCIRCTest | , |
| samePointsWithCenter | |||
| ) |
Use three points (with center) with a really small distance between to trigger a internal throw from KDL.
Definition at line 336 of file unittest_trajectory_generator_circ.cpp.
◆ TEST_F() [24/27]
| TEST_F | ( | TrajectoryGeneratorCIRCTest | , |
| samePointsWithInterim | |||
| ) |
Use three points (with interim) with a really small distance between.
Expected: Planning should fail.
Definition at line 359 of file unittest_trajectory_generator_circ.cpp.
◆ TEST_F() [25/27]
| TEST_F | ( | TrajectoryGeneratorCIRCTest | , |
| TestExceptionErrorCodeMapping | |||
| ) |
Checks that each derived MoveItErrorCodeException contains the correct error code.
Definition at line 219 of file unittest_trajectory_generator_circ.cpp.
◆ TEST_F() [26/27]
| TEST_F | ( | TrajectoryGeneratorCIRCTest | , |
| ValidCommand | |||
| ) |
Definition at line 297 of file unittest_trajectory_generator_circ.cpp.
◆ TEST_F() [27/27]
| TEST_F | ( | TrajectoryGeneratorCIRCTest | , |
| velScaleToHigh | |||
| ) |
Generate invalid circ with to high vel scaling.
Definition at line 309 of file unittest_trajectory_generator_circ.cpp.