moveit2
The MoveIt Motion Planning Framework for ROS 2.
moveit_planners
pilz_industrial_motion_planner
test
unit_tests
src
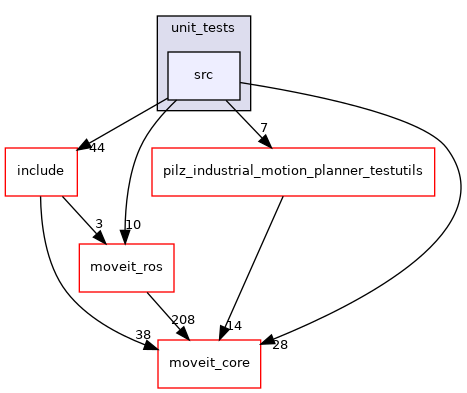
src Directory Reference
Directory dependency graph for src:
Files
file
unittest_cartesian_limits_aggregator.cpp
[code]
file
unittest_get_solver_tip_frame.cpp
[code]
file
unittest_joint_limit.cpp
[code]
file
unittest_joint_limits_aggregator.cpp
[code]
file
unittest_joint_limits_container.cpp
[code]
file
unittest_joint_limits_validator.cpp
[code]
file
unittest_pilz_industrial_motion_planner.cpp
[code]
file
unittest_pilz_industrial_motion_planner_direct.cpp
[code]
file
unittest_planning_context.cpp
[code]
file
unittest_planning_context_loaders.cpp
[code]
file
unittest_trajectory_blender_transition_window.cpp
[code]
file
unittest_trajectory_functions.cpp
[code]
file
unittest_trajectory_generator.cpp
[code]
file
unittest_trajectory_generator_circ.cpp
[code]
file
unittest_trajectory_generator_common.cpp
[code]
file
unittest_trajectory_generator_lin.cpp
[code]
file
unittest_trajectory_generator_ptp.cpp
[code]
file
unittest_velocity_profile_atrap.cpp
[code]
Generated by
1.9.1