#include <memory>#include <gtest/gtest.h>#include <pilz_industrial_motion_planner/joint_limits_aggregator.h>#include <pilz_industrial_motion_planner/trajectory_generator_lin.h>#include <pilz_industrial_motion_planner_testutils/command_types_typedef.h>#include <pilz_industrial_motion_planner_testutils/xml_testdata_loader.h>#include "test_utils.h"#include <moveit/kinematic_constraints/utils.h>#include <moveit/robot_model/robot_model.h>#include <moveit/robot_model_loader/robot_model_loader.h>#include <moveit/robot_state/conversions.h>#include <moveit/robot_state/robot_state.h>#include <rclcpp/rclcpp.hpp>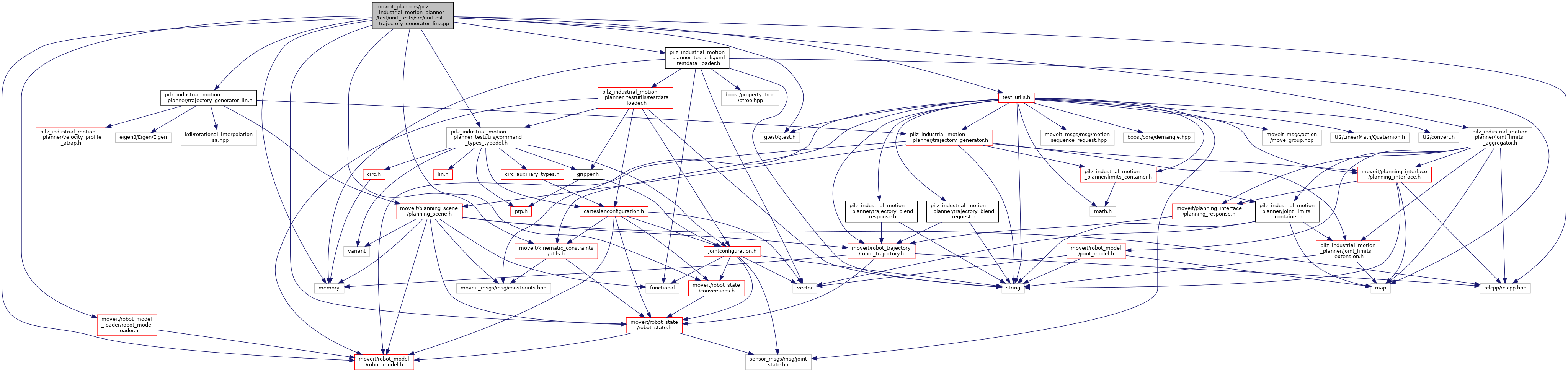
Go to the source code of this file.
Classes | |
| class | TrajectoryGeneratorLINTest |
| Parameterized unittest of trajectory generator LIN to enable tests against different robot models.The parameter is the name of robot model parameter on the ros parameter server. More... | |
Functions | |
| const std::string | TEST_DATA_FILE_NAME ("testdata_file_name") |
| const std::string | PARAM_PLANNING_GROUP_NAME ("planning_group") |
| const std::string | TARGET_LINK_HCD ("target_link_hand_computed_data") |
| const std::string | RANDOM_TEST_TRIAL_NUM ("random_trial_number") |
| const std::string | JOINT_POSITION_TOLERANCE ("joint_position_tolerance") |
| const std::string | JOINT_VELOCITY_TOLERANCE ("joint_velocity_tolerance") |
| const std::string | POSE_TRANSFORM_MATRIX_NORM_TOLERANCE ("pose_norm_tolerance") |
| const std::string | ROTATION_AXIS_NORM_TOLERANCE ("rot_axis_norm_tolerance") |
| const std::string | VELOCITY_SCALING_FACTOR ("velocity_scaling_factor") |
| const std::string | OTHER_TOLERANCE ("other_tolerance") |
| TEST_F (TrajectoryGeneratorLINTest, TestExceptionErrorCodeMapping) | |
| Checks that each derived MoveItErrorCodeException contains the correct error code. More... | |
| TEST_F (TrajectoryGeneratorLINTest, nonZeroStartVelocity) | |
| test the lin planner with invalid motion plan request which has non zero start velocity More... | |
| TEST_F (TrajectoryGeneratorLINTest, jointSpaceGoal) | |
| test the lin planner with joint space goal More... | |
| TEST_F (TrajectoryGeneratorLINTest, jointSpaceGoalNearZeroStartVelocity) | |
| test the lin planner with joint space goal with start velocity almost zero More... | |
| TEST_F (TrajectoryGeneratorLINTest, cartesianSpaceGoal) | |
| test the lin planner with Cartesian goal More... | |
| TEST_F (TrajectoryGeneratorLINTest, cartesianTrapezoidProfile) | |
| test the trapezoid shape of the planning trajectory in Cartesian space More... | |
| TEST_F (TrajectoryGeneratorLINTest, LinPlannerLimitViolation) | |
| Check that lin planner returns 'false' if calculated lin trajectory violates velocity/acceleration or deceleration limits. More... | |
| TEST_F (TrajectoryGeneratorLINTest, LinPlannerDiscontinuousJointTraj) | |
| test joint linear movement with discontinuities in joint space More... | |
| TEST_F (TrajectoryGeneratorLINTest, LinStartEqualsGoal) | |
| test joint linear movement with equal goal and start More... | |
| TEST_F (TrajectoryGeneratorLINTest, CtorNoLimits) | |
| Checks that constructor throws an exception if no limits are given. More... | |
| TEST_F (TrajectoryGeneratorLINTest, IncorrectJointNumber) | |
| Checks that generate() function returns 'false' if called with an incorrect number of joints. More... | |
| TEST_F (TrajectoryGeneratorLINTest, cartGoalFrameIdBothConstraints) | |
| Set a frame id in goal constraint with cartesian goal on both position and orientation constraints. More... | |
| int | main (int argc, char **argv) |
Function Documentation
◆ JOINT_POSITION_TOLERANCE()
| const std::string JOINT_POSITION_TOLERANCE | ( | "joint_position_tolerance" | ) |

◆ JOINT_VELOCITY_TOLERANCE()
| const std::string JOINT_VELOCITY_TOLERANCE | ( | "joint_velocity_tolerance" | ) |

◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 447 of file unittest_trajectory_generator_lin.cpp.
◆ OTHER_TOLERANCE()
| const std::string OTHER_TOLERANCE | ( | "other_tolerance" | ) |

◆ PARAM_PLANNING_GROUP_NAME()
| const std::string PARAM_PLANNING_GROUP_NAME | ( | "planning_group" | ) |

◆ POSE_TRANSFORM_MATRIX_NORM_TOLERANCE()
| const std::string POSE_TRANSFORM_MATRIX_NORM_TOLERANCE | ( | "pose_norm_tolerance" | ) |

◆ RANDOM_TEST_TRIAL_NUM()
| const std::string RANDOM_TEST_TRIAL_NUM | ( | "random_trial_number" | ) |

◆ ROTATION_AXIS_NORM_TOLERANCE()
| const std::string ROTATION_AXIS_NORM_TOLERANCE | ( | "rot_axis_norm_tolerance" | ) |

◆ TARGET_LINK_HCD()
| const std::string TARGET_LINK_HCD | ( | "target_link_hand_computed_data" | ) |

◆ TEST_DATA_FILE_NAME()
| const std::string TEST_DATA_FILE_NAME | ( | "testdata_file_name" | ) |

◆ TEST_F() [1/12]
| TEST_F | ( | TrajectoryGeneratorLINTest | , |
| cartesianSpaceGoal | |||
| ) |
test the lin planner with Cartesian goal
Definition at line 262 of file unittest_trajectory_generator_lin.cpp.
◆ TEST_F() [2/12]
| TEST_F | ( | TrajectoryGeneratorLINTest | , |
| cartesianTrapezoidProfile | |||
| ) |
test the trapezoid shape of the planning trajectory in Cartesian space
The test checks translational path for a trapezoid velocity profile. Due to the way the acceleration is calculated 1 or 2 intermediate points occur that are neither acceleration, constant or deceleration.
+++++++++++++++++++++++
- plan LIN trajectory + +++++++++++++++++++++++
Definition at line 284 of file unittest_trajectory_generator_lin.cpp.

◆ TEST_F() [3/12]
| TEST_F | ( | TrajectoryGeneratorLINTest | , |
| cartGoalFrameIdBothConstraints | |||
| ) |
Set a frame id in goal constraint with cartesian goal on both position and orientation constraints.
Definition at line 430 of file unittest_trajectory_generator_lin.cpp.
◆ TEST_F() [4/12]
| TEST_F | ( | TrajectoryGeneratorLINTest | , |
| CtorNoLimits | |||
| ) |
Checks that constructor throws an exception if no limits are given.
Test Sequence:
- Call Ctor without set limits.
Expected Results:
- Ctor throws exception.
Definition at line 394 of file unittest_trajectory_generator_lin.cpp.
◆ TEST_F() [5/12]
| TEST_F | ( | TrajectoryGeneratorLINTest | , |
| IncorrectJointNumber | |||
| ) |
Checks that generate() function returns 'false' if called with an incorrect number of joints.
Test Sequence:
- Call functions with incorrect number of joints.
Expected Results:
- Function returns 'false'.
Definition at line 412 of file unittest_trajectory_generator_lin.cpp.
◆ TEST_F() [6/12]
| TEST_F | ( | TrajectoryGeneratorLINTest | , |
| jointSpaceGoal | |||
| ) |
test the lin planner with joint space goal
Definition at line 225 of file unittest_trajectory_generator_lin.cpp.
◆ TEST_F() [7/12]
| TEST_F | ( | TrajectoryGeneratorLINTest | , |
| jointSpaceGoalNearZeroStartVelocity | |||
| ) |
test the lin planner with joint space goal with start velocity almost zero
Definition at line 242 of file unittest_trajectory_generator_lin.cpp.
◆ TEST_F() [8/12]
| TEST_F | ( | TrajectoryGeneratorLINTest | , |
| LinPlannerDiscontinuousJointTraj | |||
| ) |
test joint linear movement with discontinuities in joint space
This will violate joint velocity/acceleration limits.
Test Sequence:
- Generate lin trajectory which is discontinuous in joint space.
Expected Results:
- Function returns 'false'.
Definition at line 339 of file unittest_trajectory_generator_lin.cpp.

◆ TEST_F() [9/12]
| TEST_F | ( | TrajectoryGeneratorLINTest | , |
| LinPlannerLimitViolation | |||
| ) |
Check that lin planner returns 'false' if calculated lin trajectory violates velocity/acceleration or deceleration limits.
Test Sequence:
- Call function with lin request violating velocity/acceleration or deceleration limits.
Expected Results:
- Function returns 'false'.
Definition at line 319 of file unittest_trajectory_generator_lin.cpp.

◆ TEST_F() [10/12]
| TEST_F | ( | TrajectoryGeneratorLINTest | , |
| LinStartEqualsGoal | |||
| ) |
test joint linear movement with equal goal and start
Test Sequence:
- Call function with lin request start = goal
Expected Results:
- trajectory generation is successful.
Definition at line 363 of file unittest_trajectory_generator_lin.cpp.

◆ TEST_F() [11/12]
| TEST_F | ( | TrajectoryGeneratorLINTest | , |
| nonZeroStartVelocity | |||
| ) |
test the lin planner with invalid motion plan request which has non zero start velocity
Definition at line 209 of file unittest_trajectory_generator_lin.cpp.
◆ TEST_F() [12/12]
| TEST_F | ( | TrajectoryGeneratorLINTest | , |
| TestExceptionErrorCodeMapping | |||
| ) |
Checks that each derived MoveItErrorCodeException contains the correct error code.
Definition at line 187 of file unittest_trajectory_generator_lin.cpp.
◆ VELOCITY_SCALING_FACTOR()
| const std::string VELOCITY_SCALING_FACTOR | ( | "velocity_scaling_factor" | ) |
