#include <memory>#include <gtest/gtest.h>#include <pilz_industrial_motion_planner/joint_limits_aggregator.h>#include <pilz_industrial_motion_planner/trajectory_generator_ptp.h>#include "test_utils.h"#include <moveit/kinematic_constraints/utils.h>#include <moveit/robot_model/robot_model.h>#include <moveit/robot_model_loader/robot_model_loader.h>#include <pluginlib/class_loader.hpp>#include <rclcpp/rclcpp.hpp>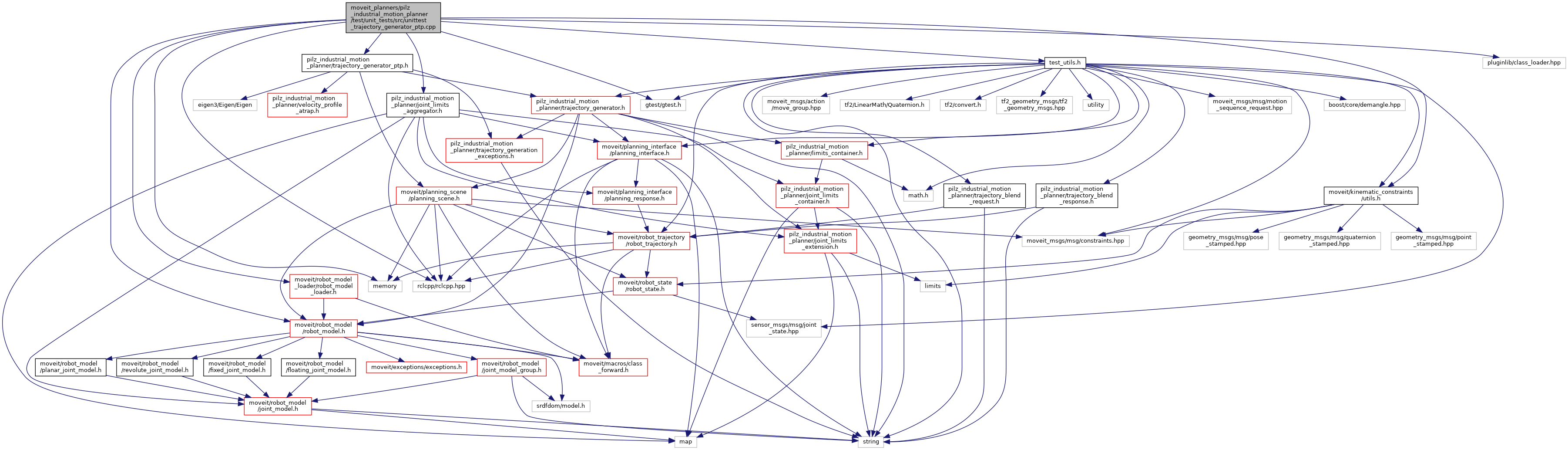
Go to the source code of this file.
Classes | |
| class | TrajectoryGeneratorPTPTest |
Functions | |
| const std::string | PARAM_PLANNING_GROUP_NAME ("planning_group") |
| const std::string | PARAM_TARGET_LINK_NAME ("target_link") |
| const std::string | JOINT_POSITION_TOLERANCE ("joint_position_tolerance") |
| const std::string | JOINT_VELOCITY_TOLERANCE ("joint_velocity_tolerance") |
| const std::string | JOINT_ACCELERATION_TOLERANCE ("joint_acceleration_tolerance") |
| const std::string | POSE_TRANSFORM_MATRIX_NORM_TOLERANCE ("pose_norm_tolerance") |
| TEST_F (TrajectoryGeneratorPTPTest, TestExceptionErrorCodeMapping) | |
| Checks that each derived MoveItErrorCodeException contains the correct error code. More... | |
| TEST_F (TrajectoryGeneratorPTPTest, noLimits) | |
| Construct a TrajectoryGeneratorPTP with no limits given. More... | |
| TEST_F (TrajectoryGeneratorPTPTest, emptyRequest) | |
| Send an empty request, define res.trajectory_. More... | |
| TEST_F (TrajectoryGeneratorPTPTest, missingVelocityLimits) | |
| Construct a TrajectoryGeneratorPTP with missing velocity limits. More... | |
| TEST_F (TrajectoryGeneratorPTPTest, missingDecelerationimits) | |
| Construct a TrajectoryGeneratorPTP missing deceleration limits. More... | |
| TEST_F (TrajectoryGeneratorPTPTest, testInsufficientLimit) | |
| test the constructor when insufficient limits are given More... | |
| TEST_F (TrajectoryGeneratorPTPTest, testCartesianGoal) | |
| test the ptp trajectory generator of Cartesian space goal More... | |
| TEST_F (TrajectoryGeneratorPTPTest, testCartesianGoalMissingLinkNameConstraints) | |
| Check that missing a link_name in position or orientation constraints is detected. More... | |
| TEST_F (TrajectoryGeneratorPTPTest, testInvalidCartesianGoal) | |
| test the ptp trajectory generator of invalid Cartesian space goal More... | |
| TEST_F (TrajectoryGeneratorPTPTest, testJointGoalAlreadyReached) | |
| test the ptp trajectory generator of joint space goal which is close enough to the start which does not need to plan the trajectory More... | |
| TEST_F (TrajectoryGeneratorPTPTest, testScalingFactor) | |
| test scaling factor with zero start velocity More... | |
| TEST_F (TrajectoryGeneratorPTPTest, testJointGoalAndAlmostZeroStartVelocity) | |
| test the ptp trajectory generator of joint space goal with (almost) zero start velocity More... | |
| TEST_F (TrajectoryGeneratorPTPTest, testJointGoalNoStartVel) | |
| test the ptp_ trajectory generator of joint space goal with zero start velocity More... | |
| int | main (int argc, char **argv) |
Function Documentation
◆ JOINT_ACCELERATION_TOLERANCE()
| const std::string JOINT_ACCELERATION_TOLERANCE | ( | "joint_acceleration_tolerance" | ) |
◆ JOINT_POSITION_TOLERANCE()
| const std::string JOINT_POSITION_TOLERANCE | ( | "joint_position_tolerance" | ) |
◆ JOINT_VELOCITY_TOLERANCE()
| const std::string JOINT_VELOCITY_TOLERANCE | ( | "joint_velocity_tolerance" | ) |
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 980 of file unittest_trajectory_generator_ptp.cpp.
◆ PARAM_PLANNING_GROUP_NAME()
| const std::string PARAM_PLANNING_GROUP_NAME | ( | "planning_group" | ) |
◆ PARAM_TARGET_LINK_NAME()
| const std::string PARAM_TARGET_LINK_NAME | ( | "target_link" | ) |
◆ POSE_TRANSFORM_MATRIX_NORM_TOLERANCE()
| const std::string POSE_TRANSFORM_MATRIX_NORM_TOLERANCE | ( | "pose_norm_tolerance" | ) |
◆ TEST_F() [1/13]
| TEST_F | ( | TrajectoryGeneratorPTPTest | , |
| emptyRequest | |||
| ) |
Send an empty request, define res.trajectory_.
- Test Sequence:
- Create request, define a trajectory in the result
- assign at least one joint limit will all required limits
- Expected Results:
- the res.trajectory_ should be cleared (contain no waypoints)
Definition at line 197 of file unittest_trajectory_generator_ptp.cpp.
◆ TEST_F() [2/13]
| TEST_F | ( | TrajectoryGeneratorPTPTest | , |
| missingDecelerationimits | |||
| ) |
Construct a TrajectoryGeneratorPTP missing deceleration limits.
Definition at line 243 of file unittest_trajectory_generator_ptp.cpp.
◆ TEST_F() [3/13]
| TEST_F | ( | TrajectoryGeneratorPTPTest | , |
| missingVelocityLimits | |||
| ) |
Construct a TrajectoryGeneratorPTP with missing velocity limits.
Definition at line 218 of file unittest_trajectory_generator_ptp.cpp.
◆ TEST_F() [4/13]
| TEST_F | ( | TrajectoryGeneratorPTPTest | , |
| noLimits | |||
| ) |
Construct a TrajectoryGeneratorPTP with no limits given.
Definition at line 180 of file unittest_trajectory_generator_ptp.cpp.
◆ TEST_F() [5/13]
| TEST_F | ( | TrajectoryGeneratorPTPTest | , |
| testCartesianGoal | |||
| ) |
test the ptp trajectory generator of Cartesian space goal
Definition at line 350 of file unittest_trajectory_generator_ptp.cpp.
◆ TEST_F() [6/13]
| TEST_F | ( | TrajectoryGeneratorPTPTest | , |
| testCartesianGoalMissingLinkNameConstraints | |||
| ) |
Check that missing a link_name in position or orientation constraints is detected.
Definition at line 399 of file unittest_trajectory_generator_ptp.cpp.
◆ TEST_F() [7/13]
| TEST_F | ( | TrajectoryGeneratorPTPTest | , |
| TestExceptionErrorCodeMapping | |||
| ) |
Checks that each derived MoveItErrorCodeException contains the correct error code.
Definition at line 164 of file unittest_trajectory_generator_ptp.cpp.
◆ TEST_F() [8/13]
| TEST_F | ( | TrajectoryGeneratorPTPTest | , |
| testInsufficientLimit | |||
| ) |
test the constructor when insufficient limits are given
- Test Sequence:
- assign joint limits without acc and dec
- assign at least one joint limit per group with all required limits
- Expected Results:
- the constructor throws an exception of type TrajectoryGeneratorInvalidLimitsException
- the constructor throws no exception
Definition at line 275 of file unittest_trajectory_generator_ptp.cpp.
◆ TEST_F() [9/13]
| TEST_F | ( | TrajectoryGeneratorPTPTest | , |
| testInvalidCartesianGoal | |||
| ) |
test the ptp trajectory generator of invalid Cartesian space goal
Definition at line 437 of file unittest_trajectory_generator_ptp.cpp.
◆ TEST_F() [10/13]
| TEST_F | ( | TrajectoryGeneratorPTPTest | , |
| testJointGoalAlreadyReached | |||
| ) |
test the ptp trajectory generator of joint space goal which is close enough to the start which does not need to plan the trajectory
Definition at line 467 of file unittest_trajectory_generator_ptp.cpp.
◆ TEST_F() [11/13]
| TEST_F | ( | TrajectoryGeneratorPTPTest | , |
| testJointGoalAndAlmostZeroStartVelocity | |||
| ) |
test the ptp trajectory generator of joint space goal with (almost) zero start velocity
Definition at line 659 of file unittest_trajectory_generator_ptp.cpp.
◆ TEST_F() [12/13]
| TEST_F | ( | TrajectoryGeneratorPTPTest | , |
| testJointGoalNoStartVel | |||
| ) |
test the ptp_ trajectory generator of joint space goal with zero start velocity
Definition at line 796 of file unittest_trajectory_generator_ptp.cpp.
◆ TEST_F() [13/13]
| TEST_F | ( | TrajectoryGeneratorPTPTest | , |
| testScalingFactor | |||
| ) |
test scaling factor with zero start velocity
Definition at line 495 of file unittest_trajectory_generator_ptp.cpp.