Class for handling single DOF joint constraints. More...
#include <kinematic_constraint.hpp>
Public Member Functions | |
| JointConstraint (const moveit::core::RobotModelConstPtr &model) | |
| Constructor. | |
| bool | configure (const moveit_msgs::msg::JointConstraint &jc) |
| Configure the constraint based on a moveit_msgs::msg::JointConstraint. | |
| bool | equal (const KinematicConstraint &other, double margin) const override |
| Check if two joint constraints are the same. | |
| ConstraintEvaluationResult | decide (const moveit::core::RobotState &state, bool verbose=false) const override |
| Decide whether the constraint is satisfied in the indicated state. | |
| bool | enabled () const override |
| This function returns true if this constraint is configured and able to decide whether states do meet the constraint or not. If this function returns false it means that decide() will always return true – there is no constraint to be checked. | |
| void | clear () override |
| Clear the stored constraint. | |
| void | print (std::ostream &out=std::cout) const override |
| Print the constraint data. | |
| const moveit::core::JointModel * | getJointModel () const |
| Get the joint model for which this constraint operates. | |
| const std::string & | getLocalVariableName () const |
| Gets the local variable name if this constraint was configured for a part of a multi-DOF joint. | |
| const std::string & | getJointVariableName () const |
| Gets the joint variable name, as known to the moveit::core::RobotModel. | |
| int | getJointVariableIndex () const |
| double | getDesiredJointPosition () const |
| Gets the desired position component of the constraint. | |
| double | getJointToleranceAbove () const |
| Gets the upper tolerance component of the joint constraint. | |
| double | getJointToleranceBelow () const |
| Gets the lower tolerance component of the joint constraint. | |
 Public Member Functions inherited from kinematic_constraints::KinematicConstraint Public Member Functions inherited from kinematic_constraints::KinematicConstraint | |
| KinematicConstraint (const moveit::core::RobotModelConstPtr &model) | |
| Constructor. | |
| virtual | ~KinematicConstraint () |
| ConstraintType | getType () const |
| Get the type of constraint. | |
| double | getConstraintWeight () const |
| The weight of a constraint is a multiplicative factor associated to the distance computed by the decide() function. | |
| const moveit::core::RobotModelConstPtr & | getRobotModel () const |
Protected Attributes | |
| const moveit::core::JointModel * | joint_model_ |
| The joint from the kinematic model for this constraint. | |
| bool | joint_is_continuous_ |
| Whether or not the joint is continuous. | |
| std::string | local_variable_name_ |
| The local variable name for a multi DOF joint, if any. | |
| std::string | joint_variable_name_ |
| The joint variable name. | |
| int | joint_variable_index_ |
| The index of the joint variable name in the full robot state. | |
| double | joint_position_ |
| double | joint_tolerance_above_ |
| double | joint_tolerance_below_ |
| Position and tolerance values. | |
| Protected Attributes inherited from kinematic_constraints::KinematicConstraint | |
| ConstraintType | type_ |
| The type of the constraint. | |
| moveit::core::RobotModelConstPtr | robot_model_ |
| The kinematic model associated with this constraint. | |
| double | constraint_weight_ |
| The weight of a constraint is a multiplicative factor associated to the distance computed by the decide() function | |
Additional Inherited Members | |
| Public Types inherited from kinematic_constraints::KinematicConstraint | |
| enum | ConstraintType { UNKNOWN_CONSTRAINT , JOINT_CONSTRAINT , POSITION_CONSTRAINT , ORIENTATION_CONSTRAINT , VISIBILITY_CONSTRAINT } |
| Enum for representing a constraint. More... | |
Detailed Description
Class for handling single DOF joint constraints.
This class handles single DOF constraints expressed as a tolerance above and below a target position. Multi-DOF joints can be accommodated by using local name formulations - i.e. for a planar joint specifying a constraint in terms of "planar_joint_name"/x.
Continuous revolute single DOF joints will be evaluated based on wrapping around 3.14 and -3.14. Tolerances above and below will be evaluating over the wrap. For instance, if the constraint value is 3.14 and the tolerance above is .04, a value of -3.14 is in bounds, as is a value of -3.12. -3.1 is out of bounds. Similarly, if the value of the constraint is -3.14, the tolerance above is .04, and the tolerance below is .02 then -3.1 is a valid value, as is 3.14; 3.1 is out of bounds.
Type will be JOINT_CONSTRAINT.
Definition at line 202 of file kinematic_constraint.hpp.
Constructor & Destructor Documentation
◆ JointConstraint()
|
inline |
Constructor.
- Parameters
-
[in] model The kinematic model used for constraint evaluation
Definition at line 210 of file kinematic_constraint.hpp.
Member Function Documentation
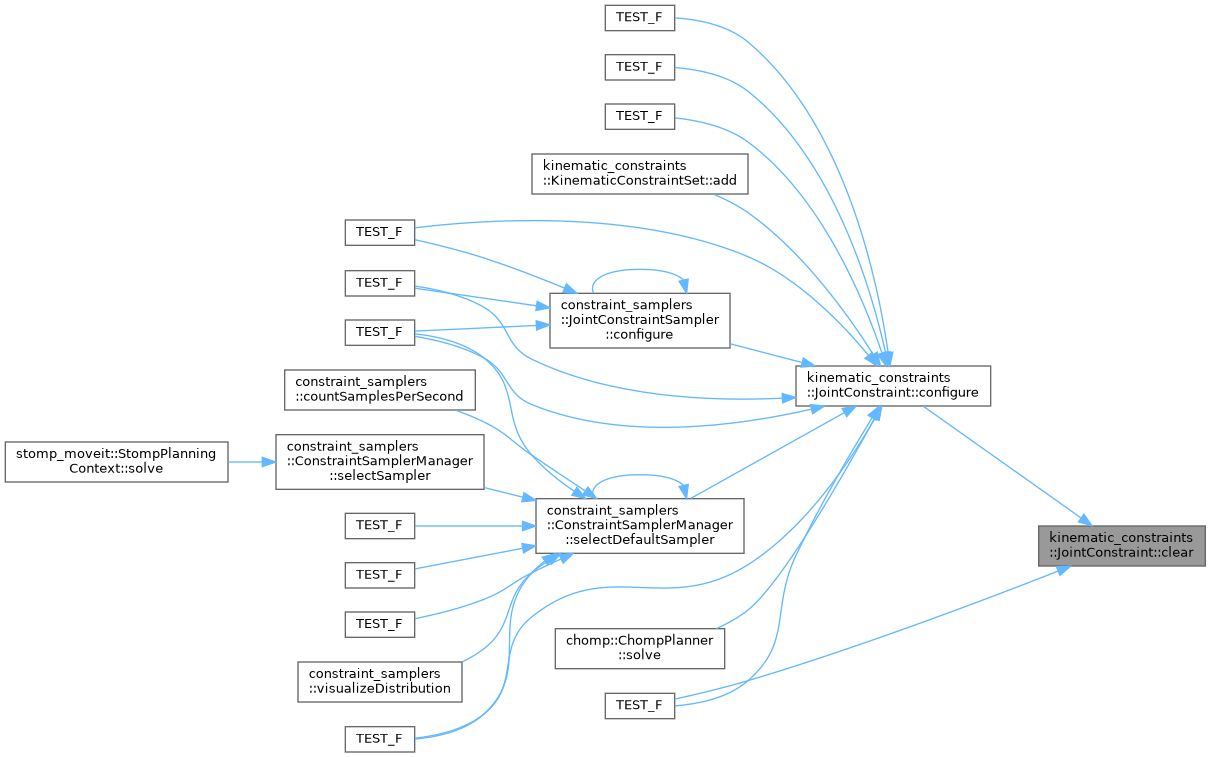
◆ clear()
|
overridevirtual |
Clear the stored constraint.
Implements kinematic_constraints::KinematicConstraint.
Definition at line 333 of file kinematic_constraint.cpp.
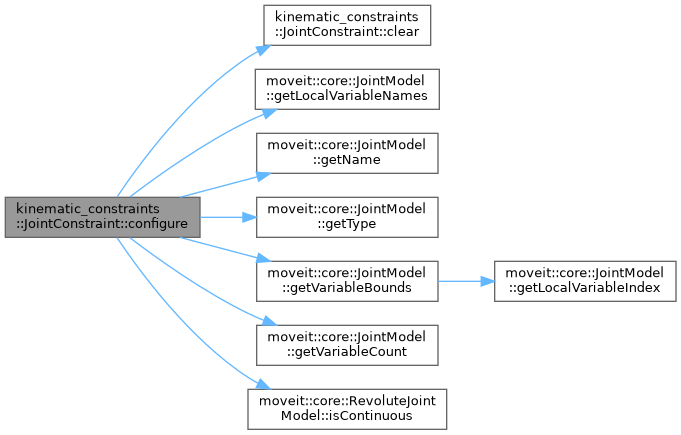
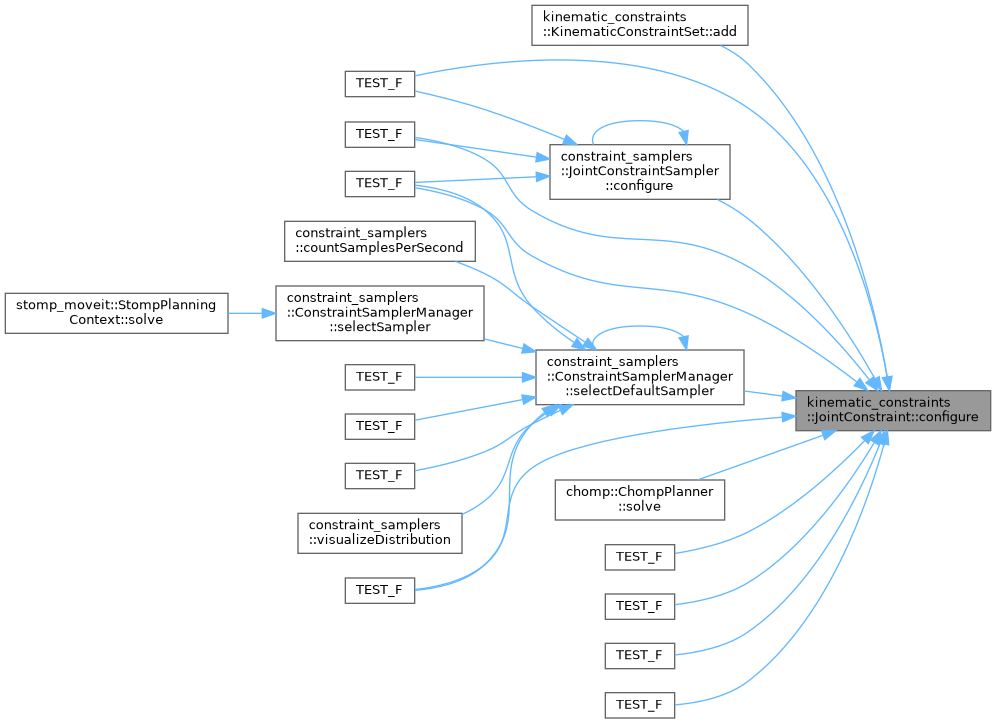
◆ configure()
| bool kinematic_constraints::JointConstraint::configure | ( | const moveit_msgs::msg::JointConstraint & | jc | ) |
Configure the constraint based on a moveit_msgs::msg::JointConstraint.
For the configure command to be successful, the joint must exist in the kinematic model, the joint must not be a multi-DOF joint (for these joints, local variables should be used), and the tolerance values must be positive.
- Parameters
-
[in] jc JointConstraint for configuration
- Returns
- True if constraint can be configured from jc
Definition at line 140 of file kinematic_constraint.cpp.
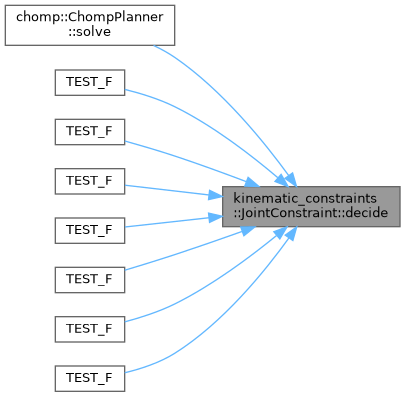
◆ decide()
|
overridevirtual |
Decide whether the constraint is satisfied in the indicated state.
- Parameters
-
[in] state The kinematic state used for evaluation [in] verbose Whether or not to print output
- Returns
Implements kinematic_constraints::KinematicConstraint.
Definition at line 289 of file kinematic_constraint.cpp.

◆ enabled()
|
overridevirtual |
This function returns true if this constraint is configured and able to decide whether states do meet the constraint or not. If this function returns false it means that decide() will always return true – there is no constraint to be checked.
Implements kinematic_constraints::KinematicConstraint.
Definition at line 328 of file kinematic_constraint.cpp.

◆ equal()
|
overridevirtual |
Check if two joint constraints are the same.
This means that the types are the same, the subject of the constraint is the same, and all values associated with the constraint are within a margin. The other constraint must also be enabled. For this to be true of joint constraints, they must act on the same joint, and the position and tolerance values must be within the margins.
- Parameters
-
[in] other The other constraint to test [in] margin The margin to apply to all values associated with constraint
- Returns
- True if equal, otherwise false
Implements kinematic_constraints::KinematicConstraint.
Definition at line 275 of file kinematic_constraint.cpp.

◆ getDesiredJointPosition()
|
inline |
Gets the desired position component of the constraint.
- Returns
- The desired joint position
Definition at line 298 of file kinematic_constraint.hpp.
◆ getJointModel()
|
inline |
Get the joint model for which this constraint operates.
- Returns
- The relevant joint model if enabled, and otherwise nullptr
Definition at line 258 of file kinematic_constraint.hpp.
◆ getJointToleranceAbove()
|
inline |
Gets the upper tolerance component of the joint constraint.
- Returns
- The above joint tolerance
Definition at line 309 of file kinematic_constraint.hpp.
◆ getJointToleranceBelow()
|
inline |
Gets the lower tolerance component of the joint constraint.
- Returns
- The below joint tolerance
Definition at line 320 of file kinematic_constraint.hpp.
◆ getJointVariableIndex()
|
inline |
Definition at line 287 of file kinematic_constraint.hpp.
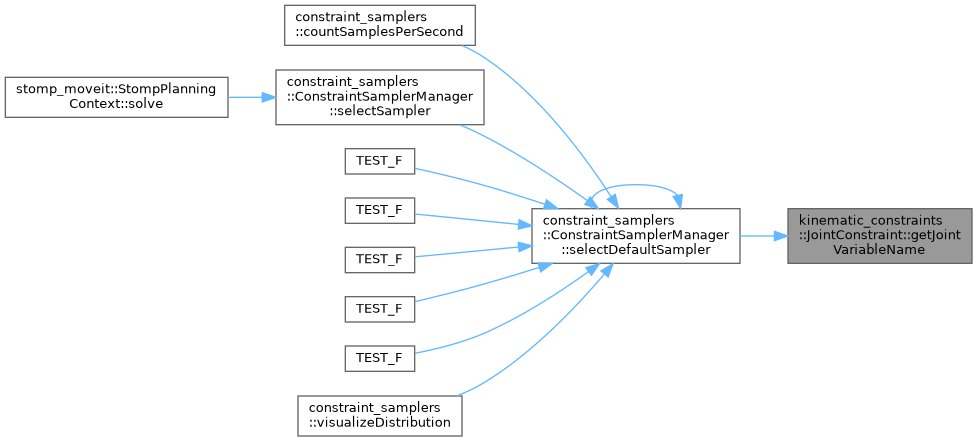
◆ getJointVariableName()
|
inline |
Gets the joint variable name, as known to the moveit::core::RobotModel.
This will include the local variable name if a variable of a multi-DOF joint is constrained.
- Returns
- The joint variable name
Definition at line 282 of file kinematic_constraint.hpp.
◆ getLocalVariableName()
|
inline |
Gets the local variable name if this constraint was configured for a part of a multi-DOF joint.
- Returns
- The component of the joint name after the slash, or the empty string if there is no local variable name
Definition at line 270 of file kinematic_constraint.hpp.
◆ print()
|
overridevirtual |
Print the constraint data.
- Parameters
-
[in] out The file descriptor for printing
Reimplemented from kinematic_constraints::KinematicConstraint.
Definition at line 343 of file kinematic_constraint.cpp.
Member Data Documentation
◆ joint_is_continuous_
|
protected |
Whether or not the joint is continuous.
Definition at line 327 of file kinematic_constraint.hpp.
◆ joint_model_
|
protected |
The joint from the kinematic model for this constraint.
Definition at line 326 of file kinematic_constraint.hpp.
◆ joint_position_
|
protected |
Definition at line 331 of file kinematic_constraint.hpp.
◆ joint_tolerance_above_
|
protected |
Definition at line 331 of file kinematic_constraint.hpp.
◆ joint_tolerance_below_
|
protected |
Position and tolerance values.
Definition at line 331 of file kinematic_constraint.hpp.
◆ joint_variable_index_
|
protected |
The index of the joint variable name in the full robot state.
Definition at line 330 of file kinematic_constraint.hpp.
◆ joint_variable_name_
|
protected |
The joint variable name.
Definition at line 329 of file kinematic_constraint.hpp.
◆ local_variable_name_
|
protected |
The local variable name for a multi DOF joint, if any.
Definition at line 328 of file kinematic_constraint.hpp.
The documentation for this class was generated from the following files:
- moveit_core/kinematic_constraints/include/moveit/kinematic_constraints/kinematic_constraint.hpp
- moveit_core/kinematic_constraints/src/kinematic_constraint.cpp