Compute different kinds of metrics for kinematics evaluation. Currently includes manipulability. More...
#include <kinematics_metrics.hpp>
Public Member Functions | |
| KinematicsMetrics (const moveit::core::RobotModelConstPtr &robot_model) | |
| Construct a KinematicsMetricss from a RobotModel. | |
| bool | getManipulabilityIndex (const moveit::core::RobotState &state, const std::string &group_name, double &manipulability_index, bool translation=false) const |
| Get the manipulability for a given group at a given joint configuration. | |
| bool | getManipulabilityIndex (const moveit::core::RobotState &state, const moveit::core::JointModelGroup *joint_model_group, double &manipulability_index, bool translation=false) const |
| Get the manipulability for a given group at a given joint configuration. | |
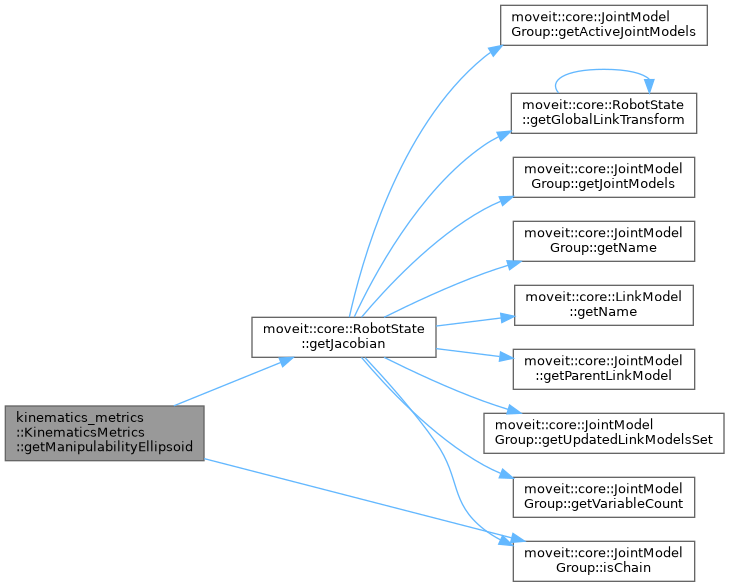
| bool | getManipulabilityEllipsoid (const moveit::core::RobotState &state, const std::string &group_name, Eigen::MatrixXcd &eigen_values, Eigen::MatrixXcd &eigen_vectors) const |
| Get the (translation) manipulability ellipsoid for a given group at a given joint configuration. | |
| bool | getManipulabilityEllipsoid (const moveit::core::RobotState &state, const moveit::core::JointModelGroup *joint_model_group, Eigen::MatrixXcd &eigen_values, Eigen::MatrixXcd &eigen_vectors) const |
| Get the (translation) manipulability ellipsoid for a given group at a given joint configuration. | |
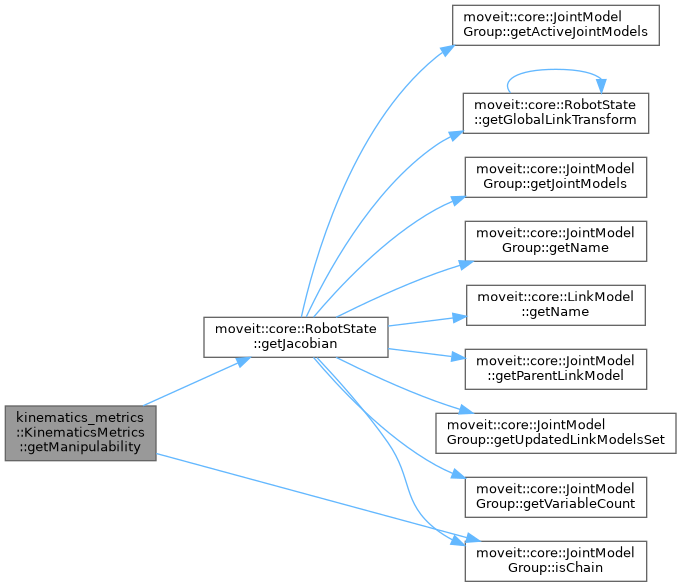
| bool | getManipulability (const moveit::core::RobotState &state, const std::string &group_name, double &condition_number, bool translation=false) const |
| Get the manipulability = sigma_min/sigma_max where sigma_min and sigma_max are the smallest and largest singular values of the Jacobian matrix J. | |
| bool | getManipulability (const moveit::core::RobotState &state, const moveit::core::JointModelGroup *joint_model_group, double &condition_number, bool translation=false) const |
| Get the manipulability = sigma_min/sigma_max where sigma_min and sigma_max are the smallest and largest singular values of the Jacobian matrix J. | |
| void | setPenaltyMultiplier (double multiplier) |
| double | getPenaltyMultiplier () const |
Protected Attributes | |
| moveit::core::RobotModelConstPtr | robot_model_ |
Detailed Description
Compute different kinds of metrics for kinematics evaluation. Currently includes manipulability.
Definition at line 50 of file kinematics_metrics.hpp.
Constructor & Destructor Documentation
◆ KinematicsMetrics()
|
inline |
Construct a KinematicsMetricss from a RobotModel.
Definition at line 54 of file kinematics_metrics.hpp.
Member Function Documentation
◆ getManipulability() [1/2]
| bool kinematics_metrics::KinematicsMetrics::getManipulability | ( | const moveit::core::RobotState & | state, |
| const moveit::core::JointModelGroup * | joint_model_group, | ||
| double & | condition_number, | ||
| bool | translation = false |
||
| ) | const |
Get the manipulability = sigma_min/sigma_max where sigma_min and sigma_max are the smallest and largest singular values of the Jacobian matrix J.
- Parameters
-
state Complete kinematic state for the robot joint_model_group A pointer to the desired joint model group condition_number Condition number for JJ^T
- Returns
- False if the group was not found
Definition at line 228 of file kinematics_metrics.cpp.
◆ getManipulability() [2/2]
| bool kinematics_metrics::KinematicsMetrics::getManipulability | ( | const moveit::core::RobotState & | state, |
| const std::string & | group_name, | ||
| double & | condition_number, | ||
| bool | translation = false |
||
| ) | const |
Get the manipulability = sigma_min/sigma_max where sigma_min and sigma_max are the smallest and largest singular values of the Jacobian matrix J.
- Parameters
-
state Complete kinematic state for the robot group_name The group name (e.g. "arm") condition_number Condition number for JJ^T
- Returns
- False if the group was not found
Definition at line 214 of file kinematics_metrics.cpp.
◆ getManipulabilityEllipsoid() [1/2]
| bool kinematics_metrics::KinematicsMetrics::getManipulabilityEllipsoid | ( | const moveit::core::RobotState & | state, |
| const moveit::core::JointModelGroup * | joint_model_group, | ||
| Eigen::MatrixXcd & | eigen_values, | ||
| Eigen::MatrixXcd & | eigen_vectors | ||
| ) | const |
Get the (translation) manipulability ellipsoid for a given group at a given joint configuration.
- Parameters
-
state Complete kinematic state for the robot joint_model_group A pointer to the desired joint model group eigen_values The eigen values for the translation part of JJ^T eigen_vectors The eigen vectors for the translation part of JJ^T
- Returns
- False if the group was not found
Definition at line 195 of file kinematics_metrics.cpp.
◆ getManipulabilityEllipsoid() [2/2]
| bool kinematics_metrics::KinematicsMetrics::getManipulabilityEllipsoid | ( | const moveit::core::RobotState & | state, |
| const std::string & | group_name, | ||
| Eigen::MatrixXcd & | eigen_values, | ||
| Eigen::MatrixXcd & | eigen_vectors | ||
| ) | const |
Get the (translation) manipulability ellipsoid for a given group at a given joint configuration.
- Parameters
-
state Complete kinematic state for the robot group_name The group name (e.g. "arm") eigen_values The eigen values for the translation part of JJ^T eigen_vectors The eigen vectors for the translation part of JJ^T
- Returns
- False if the group was not found
Definition at line 180 of file kinematics_metrics.cpp.
◆ getManipulabilityIndex() [1/2]
| bool kinematics_metrics::KinematicsMetrics::getManipulabilityIndex | ( | const moveit::core::RobotState & | state, |
| const moveit::core::JointModelGroup * | joint_model_group, | ||
| double & | manipulability_index, | ||
| bool | translation = false |
||
| ) | const |
Get the manipulability for a given group at a given joint configuration.
- Parameters
-
state Complete kinematic state for the robot joint_model_group A pointer to the desired joint model group manipulability_index The computed manipulability = sqrt(det(JJ^T))
- Returns
- False if the group was not found
Definition at line 119 of file kinematics_metrics.cpp.
◆ getManipulabilityIndex() [2/2]
| bool kinematics_metrics::KinematicsMetrics::getManipulabilityIndex | ( | const moveit::core::RobotState & | state, |
| const std::string & | group_name, | ||
| double & | manipulability_index, | ||
| bool | translation = false |
||
| ) | const |
Get the manipulability for a given group at a given joint configuration.
- Parameters
-
state Complete kinematic state for the robot group_name The group name (e.g. "arm") manipulability_index The computed manipulability = sqrt(det(JJ^T))
- Returns
- False if the group was not found
Definition at line 105 of file kinematics_metrics.cpp.
◆ getPenaltyMultiplier()
|
inline |
Definition at line 132 of file kinematics_metrics.hpp.
◆ setPenaltyMultiplier()
|
inline |
Definition at line 127 of file kinematics_metrics.hpp.
Member Data Documentation
◆ robot_model_
|
protected |
Definition at line 138 of file kinematics_metrics.hpp.
The documentation for this class was generated from the following files:
- moveit_core/kinematics_metrics/include/moveit/kinematics_metrics/kinematics_metrics.hpp
- moveit_core/kinematics_metrics/src/kinematics_metrics.cpp