Parameters for Stereo-like devices. More...
#include <stereo_camera_model.h>
Public Member Functions | |
| Parameters (unsigned width, unsigned height, float near_clipping_plane_distance, float far_clipping_plane_distance, float fx, float fy, float cx, float cy, float base_line, float disparity_resolution) | |
| Constructor. More... | |
| ~Parameters () override | |
| Descturctor. More... | |
| SensorModel::Parameters * | clone () const override |
| polymorphic clone method More... | |
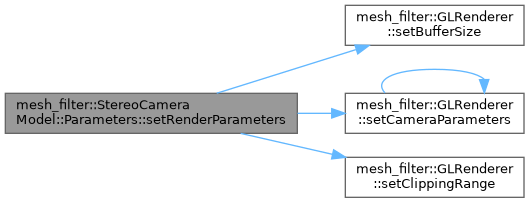
| void | setRenderParameters (GLRenderer &renderer) const override |
| set the shader parameters required for the model rendering More... | |
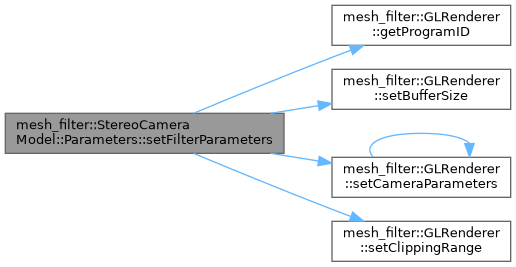
| void | setFilterParameters (GLRenderer &renderer) const override |
| set the shader parameters required for the mesh filtering More... | |
| void | setCameraParameters (float fx, float fy, float cx, float cy) |
| sets the camera parameters of the pinhole camera where the disparities were obtained. Usually the left camera More... | |
| void | setBaseline (float base_line) |
| sets the base line = distance of the two projective devices (camera, projector-camera) More... | |
| void | setDisparityResolution (float disparity_resolution) |
| the quantization of disparity values in pixels. Usually 1/16th or 1/8th for OpenNI compatible devices More... | |
| const Eigen::Vector3f & | getPaddingCoefficients () const override |
| returns the coefficients that are required for obtaining the padding for meshes More... | |
 Public Member Functions inherited from mesh_filter::SensorModel::Parameters Public Member Functions inherited from mesh_filter::SensorModel::Parameters | |
| Parameters (unsigned width, unsigned height, float near_clipping_plane_distance, float far_clipping_plane_distance) | |
| Constructor taking core parameters that are required for all sensors. More... | |
| virtual void | transformModelDepthToMetricDepth (double *depth) const |
| transforms depth values from rendered model to metric depth values More... | |
| virtual void | transformFilteredDepthToMetricDepth (double *depth) const |
| transforms depth values from filtered depth to metric depth values More... | |
| void | setImageSize (unsigned width, unsigned height) |
| sets the image size More... | |
| void | setDepthRange (float near, float far) |
| sets the clipping range More... | |
| unsigned | getWidth () const |
| returns the width of depth maps More... | |
| unsigned | getHeight () const |
| returns the height of depth maps More... | |
| float | getNearClippingPlaneDistance () const |
| returns distance to the near clipping plane More... | |
| float | getFarClippingPlaneDistance () const |
| returns the distance to the far clipping plane More... | |
Additional Inherited Members | |
| Protected Attributes inherited from mesh_filter::SensorModel::Parameters | |
| unsigned | width_ |
| width of depth maps generated by the sensor More... | |
| unsigned | height_ |
| height of depth maps generated by the sensor More... | |
| float | far_clipping_plane_distance_ |
| distance of far clipping plane More... | |
| float | near_clipping_plane_distance_ |
| distance of near clipping plane More... | |
Detailed Description
Parameters for Stereo-like devices.
Definition at line 57 of file stereo_camera_model.h.
Constructor & Destructor Documentation
◆ Parameters()
| mesh_filter::StereoCameraModel::Parameters::Parameters | ( | unsigned | width, |
| unsigned | height, | ||
| float | near_clipping_plane_distance, | ||
| float | far_clipping_plane_distance, | ||
| float | fx, | ||
| float | fy, | ||
| float | cx, | ||
| float | cy, | ||
| float | base_line, | ||
| float | disparity_resolution | ||
| ) |
Constructor.
- Parameters
-
[in] width width of generated depth maps from this device [in] height height of generated depth maps from this device [in] near_clipping_plane_distance distance of near clipping plane [in] far_clipping_plane_distance distance of far clipping plene [in] fx focal length in x-direction [in] fy focal length in y-direction [in] cx x component of principal point [in] cy y component of principal point [in] base_line the distance in meters used to determine disparity values [in] disparity_resolution resolution/quantization of disparity values in pixels
Definition at line 40 of file stereo_camera_model.cpp.
◆ ~Parameters()
|
overridevirtualdefault |
Descturctor.
Reimplemented from mesh_filter::SensorModel::Parameters.
Member Function Documentation
◆ clone()
|
overridevirtual |
polymorphic clone method
- Returns
- deep copied Parameters of type StereoCameraModel::Parameters
Implements mesh_filter::SensorModel::Parameters.
Definition at line 57 of file stereo_camera_model.cpp.
◆ getPaddingCoefficients()
|
overridevirtual |
returns the coefficients that are required for obtaining the padding for meshes
- Returns
- the padding coefficients
Implements mesh_filter::SensorModel::Parameters.
Definition at line 94 of file stereo_camera_model.cpp.
◆ setBaseline()
| void mesh_filter::StereoCameraModel::Parameters::setBaseline | ( | float | base_line | ) |
sets the base line = distance of the two projective devices (camera, projector-camera)
- Parameters
-
[in] base_line the distance in meters
Definition at line 71 of file stereo_camera_model.cpp.
◆ setCameraParameters()
| void mesh_filter::StereoCameraModel::Parameters::setCameraParameters | ( | float | fx, |
| float | fy, | ||
| float | cx, | ||
| float | cy | ||
| ) |
sets the camera parameters of the pinhole camera where the disparities were obtained. Usually the left camera
- Parameters
-
[in] fx focal length in x-direction [in] fy focal length in y-direction [in] cx x component of principal point [in] cy y component of principal point
Definition at line 63 of file stereo_camera_model.cpp.
◆ setDisparityResolution()
| void mesh_filter::StereoCameraModel::Parameters::setDisparityResolution | ( | float | disparity_resolution | ) |
the quantization of disparity values in pixels. Usually 1/16th or 1/8th for OpenNI compatible devices
- Parameters
-
disparity_resolution
Definition at line 76 of file stereo_camera_model.cpp.
◆ setFilterParameters()
|
overridevirtual |
set the shader parameters required for the mesh filtering
- Parameters
-
[in] renderer the renderer that holds the filtering shader
Implements mesh_filter::SensorModel::Parameters.
Definition at line 99 of file stereo_camera_model.cpp.
◆ setRenderParameters()
|
overridevirtual |
set the shader parameters required for the model rendering
- Parameters
-
[in] renderer the renderer that holds the rendering shader.
Implements mesh_filter::SensorModel::Parameters.
Definition at line 81 of file stereo_camera_model.cpp.
The documentation for this class was generated from the following files:
- moveit_ros/perception/mesh_filter/include/moveit/mesh_filter/stereo_camera_model.h
- moveit_ros/perception/mesh_filter/src/stereo_camera_model.cpp